基于ARM的嵌入式航空拖靶高度控制器设计

摘要:嵌入式系统具有实时性好、可靠性高、体积小和功耗低等优势,将该技术引入新型航空拖靶高度控制器的设计,可显著提高其综合性能。基于ARM7微处理器和μC/OS-Ⅱ嵌入式实时操作系统开发了航空拖靶高度控制器,主要介绍了控制器的组成、原理和软硬件设计过程。原理样机的半实物仿真结果表明系统响应快、控制精度高,能够准确控制拖靶做超低空掠海定高飞行,达到了设计要求,控高精度可达2m。
关键词:航空拖靶;嵌入式系统;ARM;μC/OS-Ⅱ;高度控制器
0 引言
航空拖靶是一种由飞机拖曳飞行的特殊的无人飞行器,一套完整的拖靶系统主要包括拖带飞机、收放缆装置、拖缆和拖靶。其中拖带飞机一般为有人或无人驾驶飞机,收放缆装置一般为挂装在飞机上的电动或气动式绞车,拖缆是通过绞车收放的一根长约几千米而直径只有几毫米的钢缆,拖靶多为外形类似导弹的无动力飞行器,由拖缆牵引飞行。主要用途是模拟敌方来袭的导弹类目标,为己方对空导弹、火炮等防空武器系统试验或训练提供模拟目标。
随着技术的进步,现代反舰导弹多采取“超低空掠海飞行”的突防方式。与之相应,20世纪80年代以来,用于模拟反舰导弹类目标的航空拖靶,也向着这一方向快速发展。而这类拖靶都要装有高度控制器,才能实现模拟导弹的超低空掠海定高飞行能力。其中,高度控制器是核心设备,控制精度、实时性和可靠性都有较高要求。同时,伴随着计算机技术的快速发展,以应用为中心的“嵌入式系统”以其实时性好、可靠性高、体积小、重量轻、成本低和软硬件可裁减等优势,正在被广泛应用于各个领域。因此,考虑到拖靶高度控制器的设计要求与嵌入式系统的应用场合非常符合,本文基于ARM7嵌入式微处理器和μC/OS-Ⅱ嵌入式实时操作系统,设计开发了航空拖靶的高度控制器。
1 控制器组成和工作原理
高度控制器主要由无线电高度表、垂向线加速度计、控制律解算主板、舵机驱动控制板及舵机组成,其中加速度计、控制律解算主板和舵机控制板集成在一个高度控制计算机盒内,其组成如图1所示。

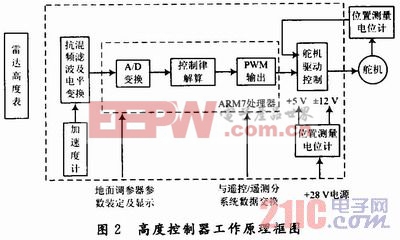
高度控制计算机是系统的中枢,它接收无线电高度表信号和加速度计信号。控制律解算主板首先对这2路信号进行抗混频滤波和电平转换等前置处理后送入A/D通道,再进行控制律解算,给出升降翼偏角的PWM控制信号至舵机驱动控制板,经舵机驱动控制板放大输出驱动舵机,舵机驱动升降翼来调整拖靶的飞行高度。系统每20 ms进行一次控制律解算。工作原理框图如图2所示。








评论