基于PID控制的导弹分通道仿真

1 引言
本文引用地址:https://www.eepw.com.cn/article/162006.htm现代高性能作战飞机普遍采用推力矢量技术,各种高空高速高机动再人弹头的威胁愈显突出,这对传统气动舵控制的导弹系统提出新的要求。现代导弹要求能够选择攻击目标,具有一定的抗干扰能力,实现全天候作战,这使得导弹向高精度、高智能、轻小型化发展;同时,导弹制导控制精度的提高已从制导转向控制。导弹目标范围不断扩大,由反飞机扩大至反巡航导弹、反弹道式导弹等反导任务。高空、高速、大机动已成为当今导弹目标的重要特征,目标的高速大机动特征导致弹一目相对运动加剧,对导弹末端过载提出很高要求;另一方面,目标的高空特征导致导弹系统效率大大降低,可用过载随高度的升高而大幅下降。为了解决这些矛盾,这里采用PID控制方法控制导弹的俯仰、偏航、滚动3个通道。
2 模型的建立
研究导弹制导问题,必须以一定的数学模型为基础。因此,在选择适当的坐标系后,分析推导出导弹的分通道的理想控制运动学模型,并建立舵机模型。
2.1 分通道的理想控制动力学方程
导弹由于存在滚动角,会造成耦合现象,从而增加控制困难,降低控制精度,故应尽量减少耦合,分通道控制。由于导弹的对称性,当滚动角为零或较小时,忽略俯仰与偏航的耦合,即单输入单输出系统。因此可用经典控制理论分通道来研究、分析和设计导弹的控制系统。
纵向运动为导弹纵向动力学方程为:
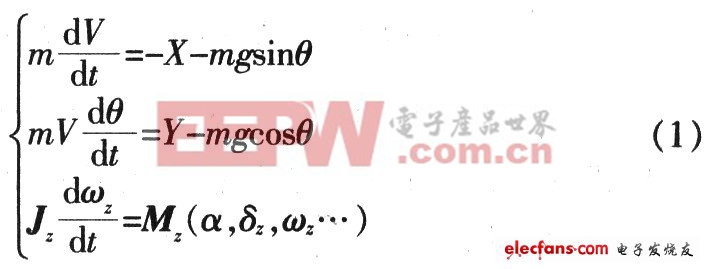
式中, 为切向力,
为切向力, 为法向力,
为法向力, 为俯仰力矩,m为导弹质量,V为导弹的飞行速度矢量,α为攻角,θ为弹道的倾角,δz为俯仰舵偏角,ωz为导弹绕弹体坐标系oz1轴的角速度,X,Y为弹上的总空气动力沿速度坐标系分解的阻力、升力,Jz为导弹绕弹体坐标系oz1轴的转动惯量,Mz为俯仰力矩。
为俯仰力矩,m为导弹质量,V为导弹的飞行速度矢量,α为攻角,θ为弹道的倾角,δz为俯仰舵偏角,ωz为导弹绕弹体坐标系oz1轴的角速度,X,Y为弹上的总空气动力沿速度坐标系分解的阻力、升力,Jz为导弹绕弹体坐标系oz1轴的转动惯量,Mz为俯仰力矩。
而侧向运动为航向和横向相互交联耦合,则导弹侧向动力学方程为:
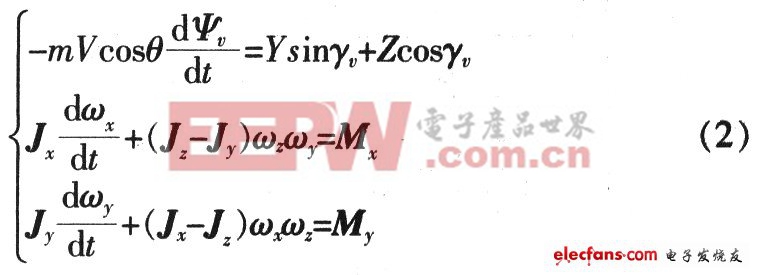
式中,-mVcosθ(dψv/dt)为导弹质心加速度的水平分量,“-”表示向心力为正,所对应的ψv为负,反之亦然。它是由角度正负号定义所决定的,dωx/dt、dωy/dt为导弹转动角加速度矢量在弹体坐标系轴上的分量,Jx、Jy、Jz分别为导弹绕弹体坐标系ox1、oy1、oz1轴的转动惯量,Mx、My分别为滚转力矩和偏航力矩,Y、Z分别为弹上的总空气动力沿速度坐标系分解的升力、侧向力,ωx、ωy、ωz分别为导弹绕弹体坐标系ox1、oy1、oz1轴的角速度。
2.2 舵机模型
2.2.1 电动机模型建立
电动机控制原理图如图1所示。
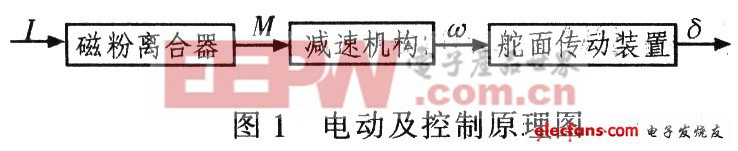
设减速比i,总转动惯量J,力矩M,输入电压u,电流I,电感L,电阻R,鼓轮的角速度与转角分别为ω和δk,舵偏角δ,电动舵机的力矩特性近似为A,机械特性近似为-B,Mj是铰链力矩, 是单位舵偏角产生的铰链力矩,TM=L/R为电动机的电气时间常数,则舵机在有载情况下的传递函数为:
是单位舵偏角产生的铰链力矩,TM=L/R为电动机的电气时间常数,则舵机在有载情况下的传递函数为:
2.2.2 舵回路
舵面的铰链力矩对舵机的影响很大,飞行控制系统采用闭环回路设计,消除其影响。舵回路一般采用位置和速度两种反馈补偿方式消除铰链力矩对其的影响。
位置反馈的传递函数为:





评论