基于PID控制的导弹分通道仿真
图5为纵向通道时域阶跃响应曲线,从图5仿真曲线可看出,在精确考虑舵机环节情况下,PID校正环节纵向通道时域阶跃响应曲线反应良好,超调量11.4%,上升时间170.6 ms调节时间(2%误差带)356.3 ms,稳态误差为0。
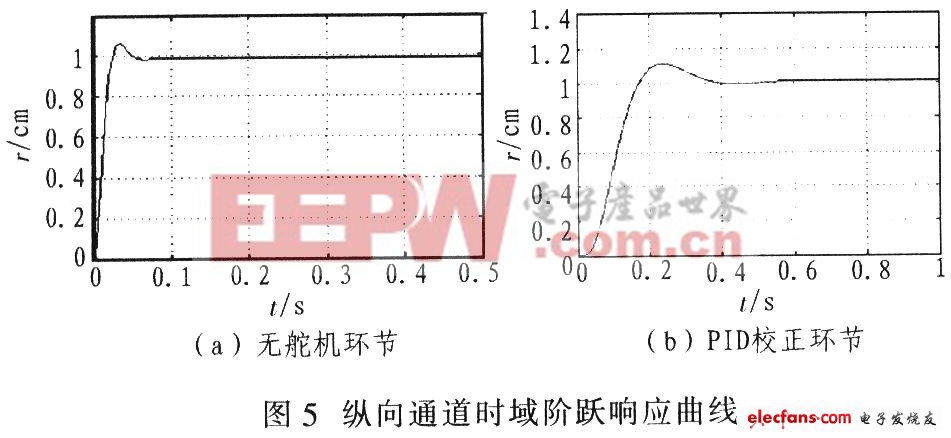
图6为横向通道时域阶跃响应曲线。从图6仿真曲线看出,在精确考虑舵机环节情况下,PID校正环节横向通道时域阶跃响应曲线反应良好,超调量11.4%,上升时间168.3 ms调节时间(2%误差带)347.1 ms,稳态误差为0。
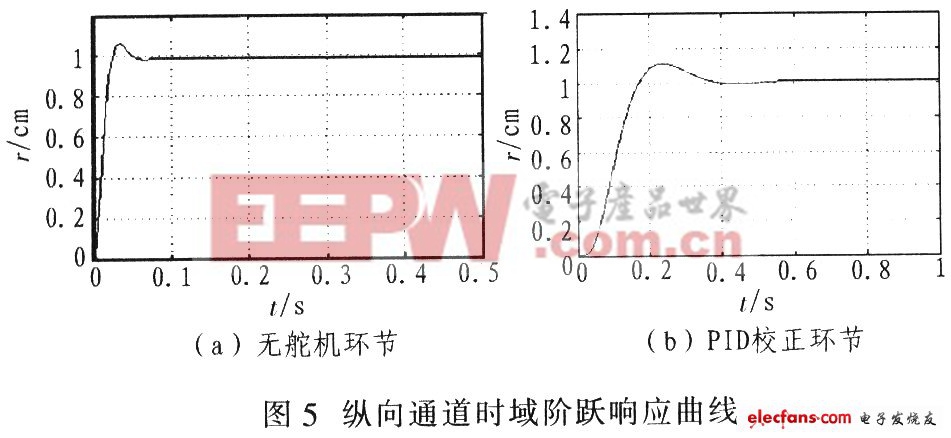
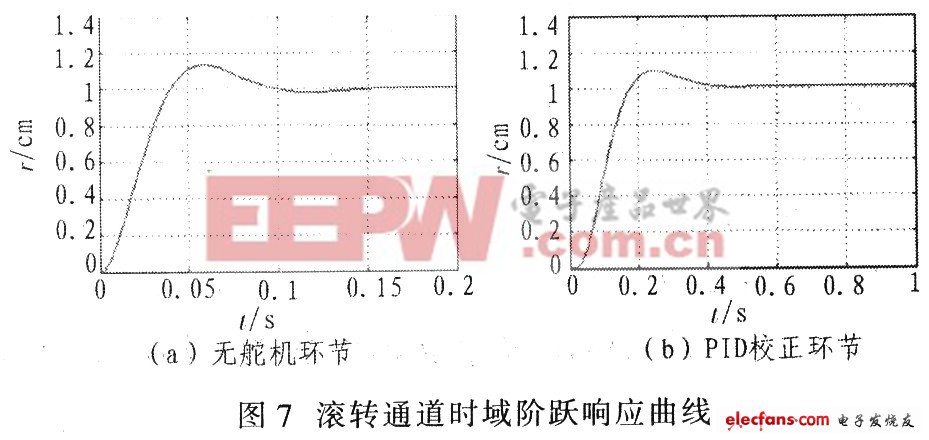
图7为滚转通道时域阶跃响应曲线。从图7的仿真曲线可看出,在精确考虑舵机环节的情况下,PID校正环节滚转通道的时域阶跃响应曲线反应良好,超调量9.81%,上升时间为178.6 ms,调节时间(2%误差带)397.1 ms,稳态误差为0。
5 结论
本文利用临界比例度法得到PID参数,利用MATLAB/Simulink进行时域仿真,从仿真结果看,该PID分通道控制方法可以提高传统气动舵导弹控制系统的准确性、快速性及稳定性。当然这只是给出与传统控制方案相比较的结果,实际的参数还要在实物仿真中不断调试,并对控制系统修正改进,以得到令人满意的控制效果。仿真结果表明,各通道系统反映良好,能够实现实时控制要求。















评论