基于嵌入式ARM Linux步进电机驱动程序的设计

摘要:本平台基于Samsung公司的友善之譬QQ2440V3开发板,它采用Samsung S3C2440为微处理器,Samsung S3C2440的内核为ARM920T,且采用Linux2.6.13内核作为它的操作系统。设计了硬件系统,并实现驱动程序对步进电机的控制,在QQ2440V3开发板上的实验结果表明驱动运行正常、稳定。这是实现激光雕刻的核心,为以后实现传能激光雕刻夯实了基础。
关键词:ARM;Linux;步进电机;驱动
0 引言
随着激光雕刻机的不断发展和改进,嵌入式Linux的激光雕刻机比CNC(Computer numerical control)激光雕刻的优势不断显现,它大幅度提高了处理能力,方便了设计开发,节约了成本,是未来经济型激光雕刻机发展的趋势。而嵌入式ARM(Advanced RISC Machines)Linux步进电机驱动是实现激光雕刻的核心。
嵌入式开发过程中,经常需要为特定设备开发驱动程序。这些驱动程序的编写和编译与PC上的Linux驱动开发相比存在明显的差异,需要考虑的因素较多,实现过程较为复杂。本文以Samsung公司的友善之譬S3C2440开发板为例,探讨如何使用嵌入式Linux开发字符设备驱动程序来驱动步进电动机。
1 硬件系统设计方案
控制系统由处理器、步进电机驱动器、步进电机3部分组成,如图1所示。

处理器用友善之譬QQ2440V3开发板,内核为ARM920T。步进电机驱动器采用北京和利时电机技术有限公司(原四通电机)的SH-20403。驱动器共有四路输入信号:公共、脉冲信号输入、方向信号输入和脱机信号输入。驱动器的输入信号既可以采用共阳极也可以采用共阴极接线方式,使用共阳极模式时,应将输入信号的电源正极连接到公共端,将输入信号连接到对应的信号端子,信号低电平有效,此时对应的内部光耦导通,控制信号输入驱动器中;对应共阴极模式时,将输入信号的电源负极连接到公共端,信号高电平有效,我们采用的是共阳极接法。
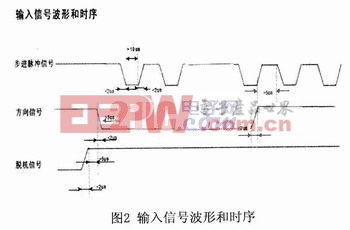
控制步进电机驱动器的时序如图2所示。








评论