基于ARM嵌入式图像处理平台的太阳跟踪系统

摘要:基于计算机视觉原理,以ARM微控制器为核心构建嵌入式图像处理平台,实现了对太阳的实时跟踪。系统采用CMOS图像传感器采集太阳图像,通过微控制器计算太阳角度,通过串口控制转台,实现对太阳的高精度跟踪。同时,与视日运动规律相结合,保证系统的可靠性。试验表明,该系统在降低系统能耗的同时,能可靠有效地跟踪太阳运动。
关键词:太阳跟踪;ARM微控制器;计算机视觉;CMOS图像传感器
0 引言
随着社会的发展和进步,环保节能已经成为人类可持续发展的必要条件。目前,再生能源的开发和利用越来越受到人们的关注。太阳能由于其普遍、无害、无限、长久等特点,成为最绿色、最理想、最可靠的替代能源。但太阳能同时存在分散,不稳定,效率低等特点,太阳能光伏系统为解决这一问题提供了条件。
就目前的太阳能光伏系统而言,如何最大限度提高太阳能的转换率,仍是国内外的研究热点。有研究表明,和始终朝南的固定表面相比,与太阳辐射方向始终保持垂直的表面对太阳能的利用率提高约33%。太阳跟踪装置可以保证太阳辐射方向始终垂直于太阳能电池板平面,使接收到的太阳辐射大大增加,提高了太阳能的接受率与利用率,因而得到广泛的应用。
太阳跟踪装置的分类方法有很多,按照跟踪方法,主要可分为视日运动跟踪和光电跟踪,视日运动跟踪又可分为单轴跟踪和双轴跟踪。光电跟踪装置有较高灵敏度,结构简单,能通过反馈消除累积误差,具有较大优势,但受环境影响很大。其关键部件是光电传感器,常用的是光敏电阻。由于光敏电阻安装位置不连续和环境光散射等因素的影响,系统不能连续跟踪太阳,精度有限。视日运动跟踪能够全天候实时跟踪,但是存在累积误差。其中,单轴跟踪装置结构简单,但跟踪误差大;双轴跟踪装置算法复杂,跟踪难度较大,但跟踪精度较高。
本文用基于32位ARM嵌入式微控制器S3C2440来构建太阳跟踪系统,采用CMOS图像传感器来感知太阳方位,并通过微控制器计算获取太阳跟踪误差,实现对太阳的高精度跟踪。加入视日运动规律,在跟踪目标丢失时,对系统进行重新定位。同时,该系统的结构简单轻便,功耗低,环境适应能力强,能应用于各种太阳能设备。
1 硬件设计
1.1 系统硬件结构
系统以ARM微控制器作为主控制器,采用CMOS图像传感器采集图像,并利用双轴转台来支撑太阳能电池板。其中双轴转台集成了电机驱动与控制部分,通过串口与主控制器进行通信。
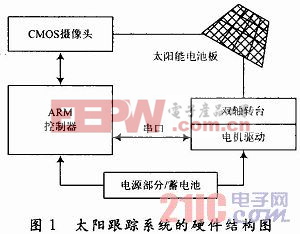
如图1所示是太阳跟踪系统的硬件结构图。在图1中,CMOS图像传感器与太阳能电池板处在同一平面,并固连在双轴转台上;ARM处理器与双轴转台的电机驱动部分采用串口通信方式;系统的供电均由蓄电池支持(包括ARM控制板和转台),因而形成了一个独立系统。系统的基本工作原理是:根据视日运动规律或CMOS图像传感器采集的天空图像,利用ARM处理器求取系统跟踪控制参数,并通过串口来控制双轴转台的转动。
1.2 硬件介绍
(1)ARM微控制器。从实用角度考虑,太阳跟踪系统的低功耗设计显得尤为重要,ARM微处理器在保证高性能的前提下能够尽量降低功耗。相对于PC机,ARM微处理器占用空间较小,质量轻,可靠性强,硬件资源丰富,在简化系统结构的同时为系统功能扩展提供了可能。系统选用32位ARM嵌入式微控制器S3C2440来构建控制平台。运用ARM微控制器构建的嵌入式图像处理平台大大提高了图像的处理速度,同时有效降低了系统成本。图像处理系统还具有拆装方便,配置灵活等优点,安全性得到大大提高。
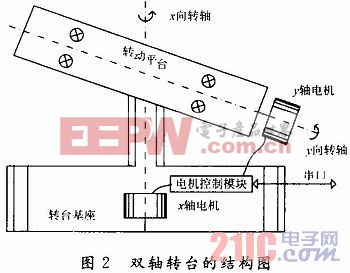
(2)双轴转台。系统采用集成式双轴转台,其结构如图2所示,工作电压为24 V,可利用蓄电池供电。在图2中,x向为水平方向,y向为垂直方向。x向转角对应太阳方位角,y向转角对应太阳高度角。该双轴转台x向转动范围为-157°~+157°,y向转动范围为0°~90°,集成了电机控制模块,并提供串行接口,控制器可以利用串口通信来控制并驱动转台在x向和y向上的转动。
(3)CMOS图像传感器。图像传感器产品主要有CCD,CMOS,CIS三种。其中CMOS图像传感器集成度高,价格低廉,而且可以实现数字化输出,软件可编程控制,提高了系统设计的灵活性,同时也具有较高的抗干扰性和稳定性。系统采用的图像传感器为OmniVision公司的OV 9650型COMS摄像头,其功耗为30μW,阵列大小为1 300×1 028 pixels,焦距为4.85 mm,像素大小为3.18μm×3.18μm,支持软件可编程控制,输出图像格式包括YUV,RGB等。








评论