基于ARM自主避障机器鱼设计

摘要:研究设计了基于ARM芯片和LINUX嵌入式系统具有自主避障功能的机器鱼。首先搭建了基于ARM芯片的硬件平台,然后对图像采集、图像显示和红外测距进行实现。通过红外传感器实现机器鱼的自主避障的功能。实验表明基于该方案设计的机器鱼能流畅地进行实时自主避障与图像显示。可以作为后续机器鱼的自主视觉功能开发的基础,提高了机器鱼的智能度。
关键词:自主避障;ARM;红外测距;LINUX嵌入式系统
随着科技的发展与进步,出现了具有特殊功能的智能机器,如索尼公司生产的能够以自我“意识”来“感觉”“学习”和“饲养”的宠物机器狗,以弗吉尼亚理工大学研制的CHARLI-L1机器人为基础进行升级改造的SAFFIR的消防机器人等。机器鱼作为一项比较新的产品,涉及到机器鱼的智能开发并不深,因此机器鱼的智能化程度并不高,但随着机器鱼研究的加深,相信机器鱼的智能度会大大提高,功能也会更趋完善。目前的机器鱼类型主要有遥控机器鱼和语音控制机器鱼,例如曾在德国汉诺威电子展上展现的通过机器鱼体内收缩来提供动力的遥控式机器鱼和在西南民族大学诞生的国内首个的声控机器鱼等。据调查显示同内涉及到具有自主避障与自主视觉功能的智能机器鱼的研究与开发并不多。由于技术等诸多原因我们选择了设计自主避障的机器鱼。由于机器鱼具有机动性、高效性、低噪性等优点,所以高智能的机器鱼适合去完成如探测污染物质、绘制港口的实时立体图和对海底资源进行探测等具有一定难度和危险的任务。由于国内涉及到机器鱼智能的开发程度不高,所以高智能的机器鱼研发有较大的空间。
1 硬件系统设计
1.1 工作原理
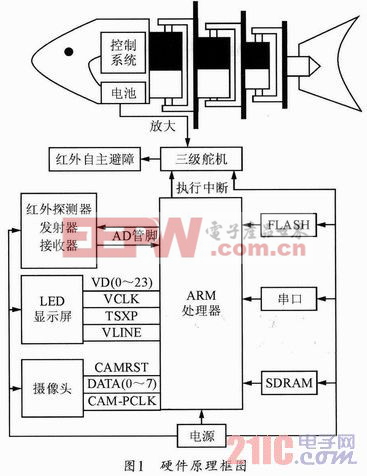
机器鱼主硬件原理如图1所示。机器鱼的自主避障功能是通过以ARM芯片、LINUX嵌入式系统、红外传感器等结合实现的。机器鱼在水中分别通过摄像头、红外传感器、LCD进行画面采集、自主避障和画而显示。摄像头采集到图片后,图像被缓存于SDRAM中。ARM芯片通过红外传感器的AD管脚向发射器传送命令,使探测器的发射模块不断地向外发送红外线,当接收器接收到返回的红外线后会立刻通过AD管脚向ARM芯片传送与红外线返回的光强相应的电压,电压经过ARM芯片的A/D转换器转变成十位的二进制数字量,通过一定的公式计算出此时与障碍物的距离。当计算出来的距离小于预设量时,ARM芯片的控制软件执行一个串行中断指令改变脉冲的脉宽即改变改PWM波的占空比变,进而改变机器鱼的游向从而避开障碍物。










评论