构建基于PXI电子液压制动系统EHB驾驶员在回路混合仿真实验平台

上面的循环通过Workspace VI启动VeriStand,获取通道数据包括Simulation Time、Animation Data、Display Data。下方的循环利用ActiveX控件将动画和显示数据传送给DYNAanimation。
本文引用地址:https://www.eepw.com.cn/article/143529.htm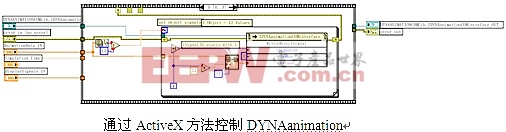
DYNAanimation将实时仿真结果在虚拟现实的环境中直接现实出来。其中,Animation Data数组中每十二个元素代表一个运动物体(如车身、轮胎)相对于大地坐标系的位置参数。Display Data用于界面的数据显示,比如车速表、转速表等。

液压控制单元在改装博世ESP的基础上得到,四个轮缸各由两个高速开关阀控制,一个控制从高压蓄能器增压,一个控制向低压蓄能器减压,需8路PWM信号。2路PWM输出负责对泵电机的控制。VeriStand中默认的PXI-7851R的通道资源拥有8路PWM输出,而这里需要10路PWM输出。通过自定义FPGA VI,修改VeriStand配置文件夹中7851R的fpgaconfig文件,新增2路数字输入输出接口为PWM输出,满足应用的需要。可见基于VeriStand的自定义FPGA I/O功能使混合仿真平台具有灵活方便的扩展性能。
5、仿真平台的功能演示
5.1、驾驶员在环麋鹿测试
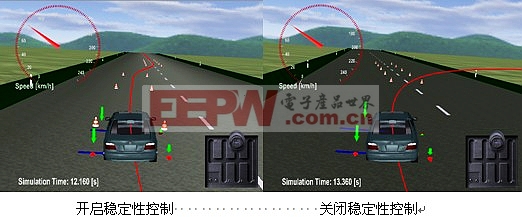
在DYNAanimation环境下建立三维图像文件,包括道路、标识线、车身模型、轮胎、路障等,进行驾驶员在环的“麋鹿”测试。在车速为80km/h时对比打开稳定性控制与关闭稳定性控制车辆的操纵响应。在实时仿真结束,保存录像并进行对比。在打开稳定性控制时,驾驶员可以平稳地实现车辆的变线,车辆的运动轨迹符合驾驶员的预期,如左下图所示。当关闭稳定性控制时,车辆失控跑出跑道。基于VeriStand构建的驾驶员在环测试平台可以实现逼真的产品演示。
5.2、利用激励进行正弦延迟测试
正弦延迟测试是美国国家高速安全局(NHTSA)规定的126号法规,用于检测车辆的侧向稳定性能。不同于麋鹿测试,现实实验中需要通过转向机器人完成。VeriStand的配置实时激励功能很好地帮助我们完成该项测试。试验在干燥、平直附着系数为0.9的道路上进行,方向盘转角进行后半周期带有延迟的正弦输入,频率为0.7HZ,第二次波峰出现后有400ms的延迟。方向盘转角及实验流程如下图,其中A为80km/h下车辆侧向加速度达到0.3g时方向盘的转角。
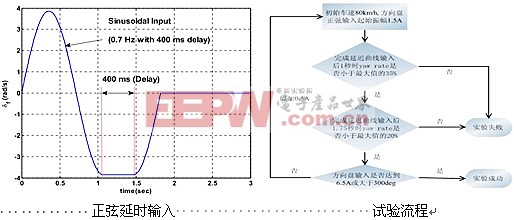
通过实时激励功能里的正弦函数、延时函数编制激励文件,通过记录功能保存横摆角速度的变化曲线。VeriStand大大降低了编程的复杂性,减少测试系统的开发时间。
6、总结
利用VeriStand我们在短时间内搭建起一个功能丰富的混合仿真平台,使我们有更多的精力投入到控制策略的研究上来;VeriStand Engine将实时测试系统的任务和功能在内部进行实施与优化,帮助实时测试系统以更快的速度运行,大大降低了应用程序开发和维护成本;基于FPGA的自定义I/O设置提高了系统硬件的可扩展性,通过FPGA虚拟传感器可扩展为基于单片机控制器的硬件在环测试平台;总之,NI公司一系列软件和硬件产品帮助我们灵活、高效、直观地实现EHB混合仿真测试平台,为产品的研制奠定了坚实的基础。












评论