基于DSP高精度伺服位置环设计

图1中TMS320F2812 DSP为控制核心,接收来自CNC、编码器接口、电流检测模块和故障信号处理模块的信息,完成对永磁同步电机控制和故障处理。光电隔离模块作为电子电路与功率主电路的接口,将DSP发出的SVPWM信号送入IPM模块,完成DC/AC逆变,驱动电动机旋转。编码器接口将绝对式编码器所记录的永磁同步电动机的磁极位置、电动机转向和编码器报警等信息送往DSP,同时将永磁同步电动机的位置信息送往CNC。电机相电流经电流检测模块量测、滤波、幅度变换、零位偏移、限幅,转化为0~3V的电压信号送入DSP的A/D引脚。功率主电路的过压、欠压、短路、电源掉电和IPM故障等信号经故障检测模块检测与处理后,送入DSP的I/O端口。键盘与显示模块是控制器的人机接口,用以完成控制参数的输入,运行状态与运行参数显示。存储器模块用以存储控制参数与系统故障信息。
本文引用地址:https://www.eepw.com.cn/article/95275.htm系统软件设计
按任务划分,系统软件由任务与任务管理模块构成,任务管理模块对人机接口、控制算法、加减速控制、故障处理等四个任务进行调度管理。控制算法主要包括:调节器控制算法、矢量控制算法和数字滤波器算法等。
按照结构化程序设计方法,遵循“功能独立”的原则,将系统软件划分为主程序模块和矢量控制程序模块两大部分,各部分又划分为若干子模块,以利于软件设计、调试、修改和维护。矢量控制软件设计采用典型的前后台模式,以主程序作为后台任务,中断服务程序作为前台任务。根据矢量控制算法的特点,中断服务程序只处理实时性高的PWM控制子程序,把系统的一些测量、键盘处理和显示等一系列实时性不高的任务放到后台任务。
主程序是软件的主体框架,其工作过程是:系统上电复位后,依次对片内外设进行初始化、从E2PROM中读出控制参数、LED显示初始信息。初始化完成后,主程序循环执行LED显示、键盘处理和参数计算与保存。
PWM中断服务。在PWM中断到来时,首先读取编码信号,进行角度和速度计算,接着进行A/D采样并执行clark和park变换,然后进行PI调节、反park变换,最后进入空间矢量模块,产生PWM信号。
控制器算法
系统采用三环控制结构,电流环、速度环采用PI控制,位置环采用比例加前馈补偿控制。
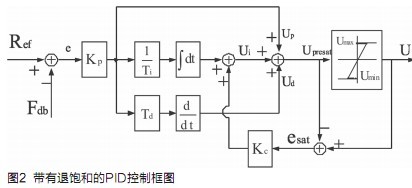
PID控制算法
PID控制算法是控制中最常用的算法,对于大多数的控制对象采用PID控制均能达到满意的效果。为防止PID调节器出现过饱和,系统采用带退饱和的PID控制器,如图2所示。

pid控制器相关文章:pid控制器原理










评论