基于C8051F的动平衡测试系统

3.2 实验
本文引用地址:https://www.eepw.com.cn/article/87320.htm以下为在一种实验装置上的实验结果。实验中我们设计被测件的转速为5HZ,每周采样64点,图2是实验中某一传感器上采集到数据的波形图,由图2可以看出其有用信号完全淹没在噪声中。
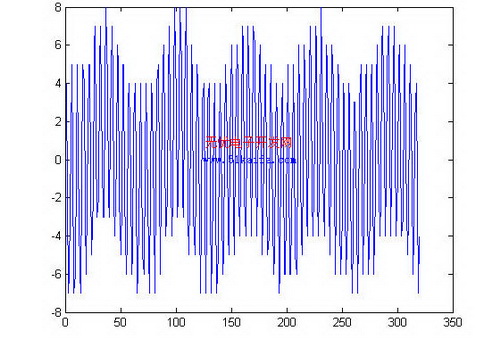
图2实际采样信号时域波形
图3是采用FFT算法对采集数据进行频域分析的数据图,可以看到,除了5HZ的基频信号,还存在两个个幅值较大的较高频率信号的干扰以及幅值很小的其他频率干扰,与采集数据是吻合的。由于实验中的不平衡量加的比较小,所以我们看到噪声干扰的幅值比基频的幅值更大。
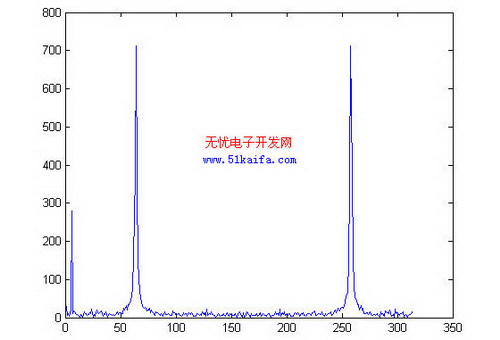
图3采样信号的傅立叶频谱图
4 结论
(1)笔者通过对一种动平衡测试系统改造,并实际验证了本测试系统,每周采样512点,平衡精度达到1g,。
(2)由于采用基于SOC技术的MCU,其丰富的片上外设,使系统体积大大缩小,电路更简洁,抗干扰能力得到提升,并且还有再扩展能力。
(3)MCU采用可编程FLASH技术可实现系统软件升级,提高了系统弹性。
本文作者创新点:采用高性能SOC技术芯片,简化系统复杂度,提升系统运算能力,提高了测试系统抗干扰能力与测量精度。
参考文献
[1] 鲍可进.C8051F单片机原理及应用[M].北京:中国电力出版社.2006年1月
[2] C8051F040/1/2/3/4/5/6/7数据手册[R/OL].www.xhl.com.cn,2004
[3] 张正松.傅尚新.旋转机械振动监测及故障诊断[M] .北京:北京机械工业出版社,1991
[4] 黄长艺,等.机械工程测试基础.北京.机械工业出版社.1997.
[5] 门浩,伍良生,杨庆昆,贺江波.基于DSP的高速主轴在线动平衡控制系统设计[J].微计算机信息,2006,10-2:40-42













评论