联合收获机凹板间隙调节系统研究

unsignedintg_dutywidth =1000; //200(20%)-1000(97.6%);
///////////////////////////
////////InitPWM////////////
voidInitPWM(void)
{
RODIV3 = 0;
RODIV2 = 0;
RODIV1 = 1;
RODIV0 = 1;
TRISC6 = 0;
TRISC7 = 0;
T2CKPS1 = 1;
T2CKPS0 = 0;
TMR2ON = 1;
PR2 = g_period;
CCPR4L = (g_dutywidth>>2)&0x00ff;
DC4B1 = (g_dutywidth>>1)&0x01;
DC4B0 = g_dutywidth&0x001;
CCP4CON =CCP4CON|0X0F;
CCPR3L = (g_dutywidth>>2)&0x00ff;
DC3B1 = (g_dutywidth>>1)&0x01;
DC3B0 = g_dutywidth&0x001;
CCP3CON =CCP3CON|0X0F;
}
4 试验结果及分析
本文引用地址:https://www.eepw.com.cn/article/271644.htm 为了测试设计电路的可行性,对电路进行了输入输出实验。利用微控制器PIC18F25K80的PWM模块对驱动电路输入常用的1KHz、40%占空比的方波对电机进行控制。从波形图中可以看出,BTS7960驱动电路能够较好地跟踪输人信号的变化,不仅波形完整稳定,并且能够把单片机输出没有驱动能力5V驱动PWM信号放大至能够驱动电机的24V电压,能够用于线性驱动器的电机驱动,实现联合收获机凹板间隙的调节。
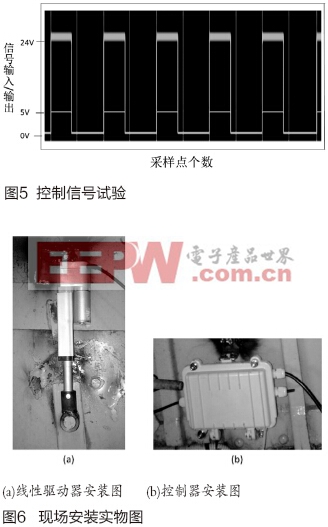
为了验证控制系统的可行性,将其安装在联合收获机上进行田间试验,其现场安装实物图如图6所示。经过多次试验结果显示其对凹板间隙的调节精度在5%以内。
5 结束语
本文设计的一款联合收获机凹板间隙自动调节系统,通过自带有CAN模块的PIC18F25K80作为微控制器,搭配TJA1050 CAN收发器,构成CAN总线节点,具有很高的性价比和可靠性,而且功耗低、布线简洁。完成了同步控制线性驱动器通讯设计要求,并且设计的基于BTS7960芯片的电机驱动电路,达到了精确控制线性驱动器的效果,同样达了试验要求,其控制精度达到5%以内。通过了试验室和室外试验的验证,该系统具有很好的实用性。
参考文献:
[1]李媛媛,孙曙光.凹板间隙对谷物联合收获机作业性能影响的试验研究[J].装备制造技术,2009,(3):3
[2]Microchip Technology Inc.PIC18F25K80 Data Sheet [EB/OL] http://ww1.microchip.com/downloads/cn/DeviceDoc/39977C
[3] BTS7960 high current PN half bridge。Infineon DataSheet.Revl.1.[Z].2004
[4]DATA SHEET. TJA1050 High-Speed CAN Transceiver[M]. Philips Semiconductors, 2001
[5]李真花,崔健.CAN总线轻松入门与实践[M]. 北京:北京航空航天大学出版社,2011

pwm相关文章:pwm是什么






评论