基于DSP的移动机器人设计与实现

3.2 驱动模块
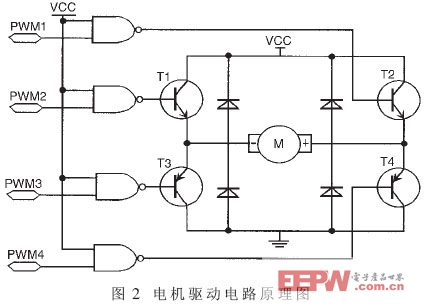
驱动电机和转向电机的驱动原理相同,都采用脉宽调制(PWM)方式进行调速,PWM信号由F2407产生。驱动电路采用H全桥方式,由4个达林顿管(2个TIPl32和2个TIPl37)、4个IN4001二极管及与非门组成。电路原理图如图2所示。 当PWM2、PWM4为低电平而PWMl、PWM3为高电平时,T1、T4饱和导通,T2、T3截止,电流从T1→电机→T4,电机正转;反之,当PWMl、PWM3为低电平而PWM2、PWM4为高电平时,T2、T3饱和导通,T1、T4截止,电流从T2→电机→T3,电机反转。
为防止T1、T3或T2、T4同时导通,形成短路而击穿器件,要用一对无重叠的PWM输出去正确地开启和关断这两对管子。在一个管子关断和另一个管子开启之间加入死区时间,这样就使得一个管子开启前,另一个管子已完全关断。F2407具有死区控制单元是其一大特色,从而可用软件确保功率电路上下桥臂开关元件的开通区间没有重叠,简化了硬件电路设计,提高了可靠性。
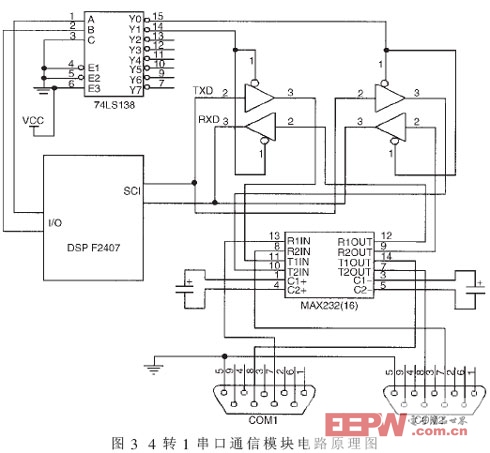
由于DGPS接收机、磁罗盘、里程计和MC35通信模块都采用RS-232异步串行通信,而F2407只有一个串行口,所以必须将4个串口数据通过转换处理来完成与F2407的串口通信。为此研制了基于分时复用方法的4转1串口通信模块。当F2407需要某个传感器(或无线通信模块)的数据时,就通过电路选通该传感器占用F2407串口进行通信;当需要另外传感器或无线通信模块数据时,则关断上次传感器的选通,同时选通该次传感器或无线通信模块。4转1串口通信模块由3-8译码器74LSl38、三态输出的四总线缓冲门74LSl25和电平转换器MAX232等组成,其电路原理图如图3所示。
3.4.1 DGPS接收机
CPS(全球定位系统)是基于卫星的无线电导航系统,它提供一种廉价实用的可在全球范围内确定位置、速度和时间的工具。CPS由24颗卫星(21颗工作星、3颗备份星)组成星座,星座分布在与地球赤道面倾角为55°的6个轨道面上,其运行周期为11小时58分,轨道半径为20200km,各轨道面夹角,为60°。每颗卫星向地球发射L频段的特高连续波,调制两种伪随机码(军用高精度保密P码和民用C/A码)。这样的分布特点保证了用户在地球上任何地点、任何时间至少可以连续地收到4颗以上卫星的导航信号,从而联立解算出接收机的三维坐标以及接收机和GPS间的时间偏移。三维坐标采用ECEF笛卡儿坐标系或大地坐标系如WGS84。
虽然美国政府于2001年5月取消了民用C/A码的可选择性保护,但民用导航型GPS接收机的单点实时定位精度只能达到25m左右,不能满足系统的定位导航要求。而采用实时差分GPS(DGPS),其定位精度可以达到2~5m,该精度已能满足系统定位和导航的要求。
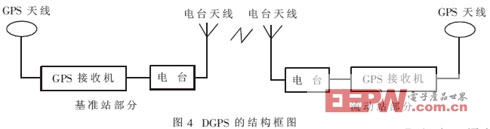
为此研发了单基站DGPS(SRDGPS)系统,其结构框图如图4所示。基准站由ALLSTAR BASE GPS接收机、天线和MDS无线电发射台、天线组成,流动站由SUPERSTAR GPS接收机、天线和MDX无线电接收台、天线组成。其中基准站安装在上海交大徐家汇校区教学一楼楼顶,该基准站能覆盖方圆30公里的范围,流动站安装在车载单元上。
采用HoneyWell公司的HMR 3300数字罗盘作为移动机器人的方向检测传感器。其主要技术指标为:(1)1度航向精度,0.1度分辨率;(2)0.5度重复性;(3)±60度倾斜俯仰范围;(4)15Hz响应时间;(5)-40+85度工作温度;(6)6~15V直流电压。
同时采用用于大众汽车公司桑塔纳2000型轿车的霍尔车速传感器作为移动机器人的车速传感器。其工作原理是以霍尔传感器为变换元件,将机械旋转量转化为电脉冲信号输出。主要技术指标为:(1)输出波形为矩形脉冲,占空比为50%;(2)每旋转一周产生6个脉冲;(3)额定电压为12V。











评论