仿生蜘蛛机器人的设计与实现

1.3 感觉器官设计
设计蜘蛛机器人的感官系统时,如果每个感官对应一个传感器模块,那么对蜘蛛机器人关节活动便会增加许多牵绊与阻碍。于是,设计采用1个集超声测距传感器、声音检测传感器、亮度传感器、温度传感器和红外线接收器于一身的Robotis公司的DynamixelAX-S1模块来充当机器人的感官系统。并且AX-S1与AX-12+机器人专用伺服电机在通信方式上一致,以便于通信和控制器统一管理;在机械上结构相同,外观上也可以达到统一、美观。
1.4 本体结构
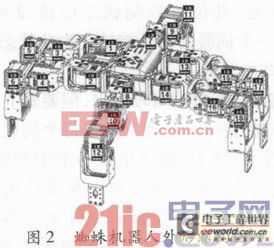
根据生物蜘蛛外形,设计总体结构为:以控制器作为身体部位,连接6足,将传感器模块作为头部。选取合适的连接件,最终拼装连接得到小型仿生蜘蛛机器人样机,如图2所示。
2 机器人行为设计
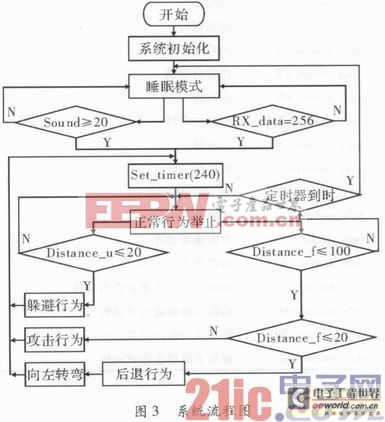
控制系统采用模块化设计,将整个工作流程划分为:系统初始化、启动模式、生物行为等。图3是系统流程图。
2.1 系统初始化
机器人的初始化需要做两部分工作,一是初始化每个伺服器的功能模式,并将每个伺服器切换到位置控制状态;二是初始化机器人的初始动作,也就是初始状态,将机器人复位。
2.1.1 伺服器初始化
初始化伺服器的功能模式是因为AX-12+具有多种功能,如果没有将其初始化,它将记忆之前的设置,按照之前的设置模式完成此次控制,则AX-12+不会正确工作。AX-12+的每个功能对应地址[ADDRESS]的固有号码,可以通过选择地址的方法来控制各个功能。例如:要设定AX-12+的位置控制状态,首先要选定所要设置伺服器的ID。ID=1的伺服器,令address=8,则进入其运转模式更改,设置mode变量,mode只有两种状态:mode=0是无线旋转模式,mode=1 023是正常位置控制状态。此处设计所用的18个伺服器被用作蜘蛛机器人的6足,其位置控制状态应该设置为mode=1 023,且每一个伺服器都要初始化为此状态。

伺服电机相关文章:伺服电机工作原理
评论