Kaiman滤波算法在FPGA上的设计与实现

2.2 有限状态机的运用
有限状态机是一种用来进行对象行为建模的工具,其作用主要是描述对象在它的生命周期内所经历的状态序列,以及如何响应来自外界的各种事件。Kalman滤波中,由于解算过程中的逻辑关系,需要分步进行,所以需要用有限状态机来控制各步的转移。根据各步间的逻辑关系,可以将其大致分为4个状态:S0,S1,S2和S3状态。其中,S0为初始化状态,之后进入S1状态,计算和Pk+1/k,然后进入S2状态,计算Kk+1,最后计算解算结果和Pk+1/k+1。计算Kk+1时,也需要将其分步实现。若将各步的解算归于同一个状态机内,则显得逻辑复杂。为使得各步的逻辑更加清晰,并且增加状态机的稳定性和安全性,使用交互状态机,如图2所示。
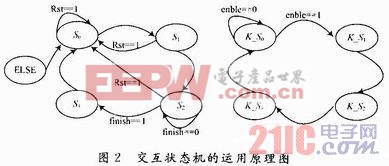
图2中,状态机的交互过程中,没置标志信号enble和finish分别用于启动和终止计算K值的状态,初始化时其值均为0。当计算完第一步进入S2时,enble置为1,启动计算K值的状态;当K值计算完成时,finish置为1,进入S3,enble和finish置为初值0,为下次状态交互做准备。进入原状态机继续进行下面的计算。
书写状态机时,采用三段式写法,一个模块采用同步时序描述状态转移,另一个模块采用组合逻辑判断转移条件并进行状态转移,第三个模块实现同步输出。三段式描述方法的状态机,做到了同步寄存器输出,消除了组合逻辑输出的不稳定和毛刺现象,而且更利于时序路径分组,综合与布局布线效果更佳。
2.3 资源分时复用
FPGA设计中,资源与速度是个矛盾体。FPGA中的资源是有限的,所以必须考虑资源的节省问题。由于Kalman滤波可以分3步进行,所以每一步可以利用其它步中相同的资源。此种方法可以在不降低总体速度的情况下,减少资源利用量;而对于阶次较高的Kalman滤波,此方法可以最大限度的增加并行性,提高速度。该设计中用到大量的乘法器、加法器以及CLB等资源,计算第一步时用到的资源会在第二步和第三步中用到,即同一资源被用到3次。以其中用到的某乘法器的分时复用为例,其输入端口在不同的时刻可以有不同的赋值,实现语句如下:

3 性能对比及分析
为验证本文研究利用FPGA实现Kalman滤波算法的性能,采用二阶Kalman滤波器进行实际性能对比测试。建立数学模型如下:选取状态转移矩阵 ,无控制量,即控制阵Uk=0,噪声系数矩阵
,无控制量,即控制阵Uk=0,噪声系数矩阵 ,Wk是系统动态噪声,是均值为0、方差阵为
,Wk是系统动态噪声,是均值为0、方差阵为 的白噪声随机序列
的白噪声随机序列 。
。
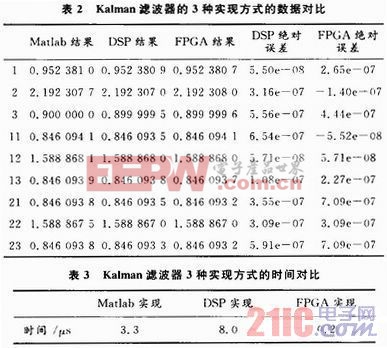
对于该滤波器分别利用三种方式实现:采用Matlab在PC机上实现、利用DSP实现和利用FPGA实现。其中,PC机为DELL Dimension4700台式机,安装Matlab 7.0软件;DSP选用双精度浮点型TMS320C6713型号的芯片;FPGA型号为XC2VP30,主频100 MHz,内嵌多达136个硬核乘法器和2 MB硬件RAM。为得到更准确合理的结果,分别截取第1~3次、11~13次、21~23次的计算结果来对比。因为在PC机上利用Matlab实现的Kalman滤波器通过软件设置可以达到很高的计算精度,所以将其得到的结果作为标准值(真值),分别用FPGA实现和DSP实现的结果与其进行对比分析。选取估计均方误差阵Pk+1/k+1的第一个元素来进行对比分析各实现方式的性能,其解算结果对比如表2和表3所示。











评论