基于Atmega16单片机的重物提升控制系统设计

5 重物提升位移量的计算
Atmega16微处理器内包含3个独立的定时器/计数器模块,其中T/C0、T/C2是8位定时器/计数器模块,T/C1是16位的定时器/计数器模块。硬件设计中选择T0、T1作为正反转计数器,记录光电编码器输出的正、负脉冲数。在软件设计中一定要将T0、T1计数器进行扩展,使其有足够的计数空间,扩展位移测量范围。笔者在设计软件时,将T0、T1进行扩展,使它们都是长整数(32位)形式,利用的就是计数器满产生溢出中断的形式扩展的。这样T0计数256个脉冲产生中断一次, T1计数65 536个脉冲产生中断一次。
T0、T1控制寄存器设置及产生溢出中断程序为:
…
TCCR0=0x06; //计数脉冲由T0引脚输入,下降沿有效。
TCCR1B=0x06; //计数脉冲由T1引脚输入,下降沿驱动
有效。
…
#pragma interrupt_handler timer1_ovf_isr:9//正计数 16bits
void timer1_ovf_isr(void){
cnt1++; //32位计数
}
#pragma interrupt_handler timer0_ovf_isr:10 //负计数8bits
void timer0_ovf_isr(void){
long c;
cnt0++; //32位计数
c=(cnt0>>8); //防止cnt0,cnt1溢出
if(c (cnt1>=c))
{cnt1-=c; //计算计数差值
cnt0=cnt00xff; //只保留低8位
} }
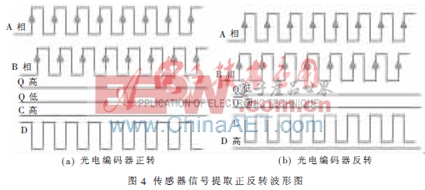
设计中,选择型号为S38-J3V100光电编码器,输出编码是500码/转,则脉冲当量是πd/500,当前的位移量就是总脉冲数与脉冲当量的乘积。软件计算程序如下:
…
posicnt=(cnt116)|TCNT1; //正脉冲数
negcnt=(cnt08)|TCNT0; //负脉冲数
totalcnt =posicnt-negcnt; //产生位移量大的总脉冲数
curPosi=(totalcnt*(meterCyl*1000+ CentCyl));
curPosi/=PLS_PER_ROUND; //当前的位移量
…
执行运行命令,微处理器就要对设定的位移量进行计算,把位移量大小转换成脉冲数的多少。在运行中进行脉冲数的比较,如果相等,则停止运行,表示已经达到目标位置。软件计算程序如下:
sysStatus = SYS_RUN;
PosiSet=meterPosi*1000+CentPosi; //毫米计算
cntSet=(PosiSet*PLS_PER_ROUND)/(CentCyl+
meter Cyl*1000);
if(cntSet>totalcnt) Command=CMD_FWD;
//执行正转命令
else if(cntSettotalcnt) Command=CMD_REV;
//执行反转命令
else sysStatus=SYS_IDLE; //停止状态
本方案设计的重物提升控制系统在实际运行过程中获得了良好的动态性能,控制精确,智能化程度高。利用光电编码器作为位移传感器,能获取高精度控制信号。高性价比的Atmega16单片机使成本大大降低,提高了软件设计的灵活性,简化了硬件电路设计,具有很好的实用价值。
参考文献
[1] 李劲松.实轴增量式光电编码器测量电路的设计[J].实验室研究与探索 2007.26(2): 12~14.
[2] Atmel Corporation.ATMEG16 用户手册[Z].Atmel Corporation,2002.
[3] Atmega16/Atmega16L Datasheet: 8 b Microcont roller with 128K bytes in 2 System Programmable Flash[Z].
[4] 阎石.数字电子技术基础[M].北京:高等教育出版社, 1997.
[5] 沈文,詹卫前. AVR单片机C语言开发入门指导[M]. 北京:清华大学出版社,2003.
[6] 马潮,詹卫前,耿德根著.ATmega 8原理及应用手册[M]. 清华大学出版社,1998.












评论