基于单片机的智能泊车系统设计

2 软件设计
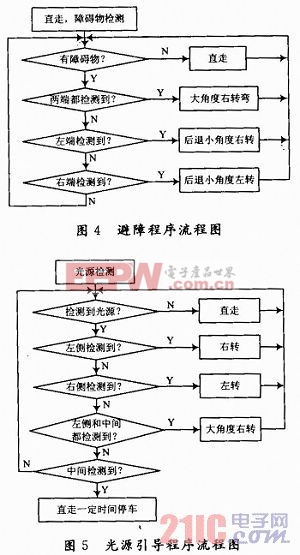
系统软件设计在Keil C51集成开发环境下进行。软件主要包括系统主程序、避障子程序、光源引导子程序和测速限速子程序等。泊车系统整体流程如图3所示,避障程序流程图、光源引导程序流程图分别如图4,图5所示。测速限速电路软件设计思路是将每圈的时间换算成速度,再与设定的速度比较,如果所测速度大于设定值,则控制电机减速到设定值;如果所测速度小于设定值,则控制电机加速到设定值,完成小车的智能限速。本文引用地址:https://www.eepw.com.cn/article/171888.htm
3 各模块测试及连接
各模块连接:小车舵机左转输入端接P3.4;小车舵机右转输入端接P3.5;小车驱动电机前进输入端接P3.6;小车驱动电机后退输入端接P3.7;光电避障模块左传感器输出端接P1.0;光电避障模块右传感器输出端接P1.1;光源引导模块左传感器输出端接P1.2;光源引导模块中间传感器输出端接P1.3;光源引导模块右传感器输出端接P1.4。
小车整体测试:把小车放在停车场入口处,打开小车电源,打开车库中对应车库位置的光源电源,小车避开障碍通过停车场下坡区,到达指定车库前面,依靠光源引导入库,停车。
4 结论
本文设计的智能泊车系统可以在实验室内实现小车的自动驶入指定停车位的功能。将小车停在停车场入口处,然后车主可以离开小车,此时小车就可以根据停车场内的车辆诱导信号(光源引导信号)将车引入停车场,从而实现自动泊车过程。












评论