基于单片机的智能泊车系统设计

1.4 电机驱动电路设计
动作执行单元为驱动小车左右轮的两个减速直流电机,控制它们的转速,就控制了小车的运动状态。但是由动作控制单元发出的控制信号非常微弱,无法直接驱动直流电机,须匹配设计合理的驱动电路,常用的驱动电路为H桥。在设计过程中发现,由于三极管导通、关断的时间不统一,导致用三极管搭建的H桥在电机电流换向的时候经常发生微短路,使得三极管发热现象很严重,整个电路电源波动很大,非常耗电。因此,本设计最终采用了集成H桥L298。除此之外,在设计过程中发现电机转动产生的反向电动势会严重影响传感器的输出状态,将错误的路径信息送给处理器,导致小车经常产生错误动作。因此,本设计采用了双电源供电,即传感器和芯片共用一组电源,电机专用一组电源,中间信号的传输采用了4N25光耦电路进行电气隔离。
1.5 光源引导电路设计
本设计采用光敏三极管作为光源检测传感器,因为其感光电压变化明显(电压值变化在60~100mV左右),价格便宜。光源引导模块需要在小车前方安装3个光敏三极管,通过车库发出的光源信号来引导小车到指定车库停车,使用LM324作为光源引导模块的核心放大器件,将信号进行放大处理。
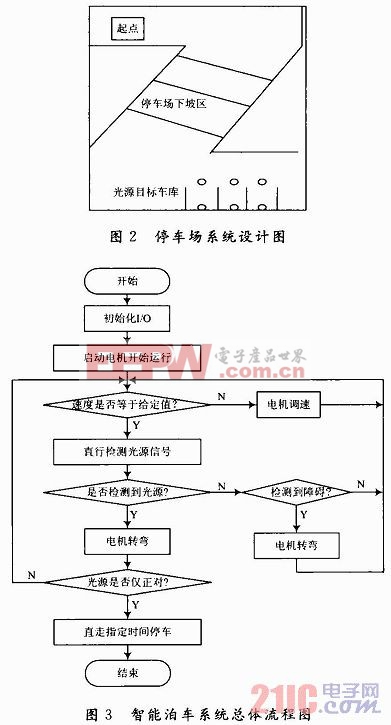
1.6 停车场系统设计
为了更好地完成小车避障、光源引导和入库过程,停车场系统设计也是十分重要的。停车场系统设计图如图2所示。本文引用地址:https://www.eepw.com.cn/article/171888.htm












评论