基于AT89S52单片机的舵机控制系统设计

控制舵饥关键是要产生与角度相对应的PWM信号,单片机通过定时器中断产生PWM信号。定置,定义TL02和TH02用于PWM信号低电平定时初值设置。例如,舵机初始位置设在90°位置,对应的PWM信号脉宽为1.5ms,即PWM信号高电平为1.5ms,低电平为20ms-1.5ms=18.5ms。所以在程序开始部分如下设置:
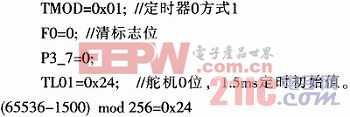
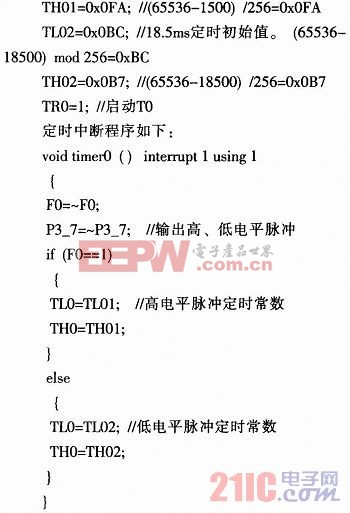
程序如此设置,系统上电后则在P3.7脚产生1.5ms高电平,然后18.5ms低电平,然后不断重复,舵机则保持在90°位置。如果有按钮被按下,则舵机按照程序设置角度增加或者减小,实质上是P3.7脚按照程序设置产生了脉宽增加或者减小的PWM信号。
4 结束语
文中设计了一个基于单片机的舵机控制系统,控制方法简单方便,而且精度比较高。在此控制系统的基础上,在舵机上安装受控部件,并增加音乐播放,可做成有声有色的玩具。本文引用地址:https://www.eepw.com.cn/article/170959.htm












评论