基于精确定位的井下运输信集闭系统的研究

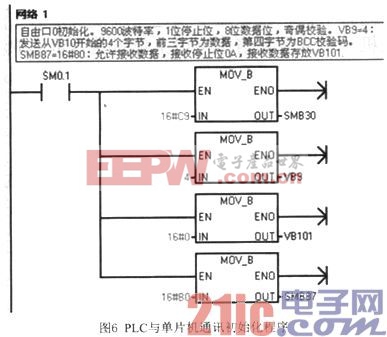
PLC把数据分为2个部分,前一部分3个字节,存放道岔数据,在每个字节中,以2个bit表示一个道岔编号,值为10时表示该道岔在定位状态,01时表示道岔在反位状态,这样每个字节就可以表示4个固定道岔的位置信息,11个道岔用3个字节就能表示。如首字节为10100101,即第一个字节为0xA5,这时道岔1D、2D、3D和4D分别同时处于定位、定位、反位和反位状态,依次类推:第二部分为第四个字节,为校验位,本设计采用BCC校验,将前三字节异或后,一并发送,在接收方经过解析校验。
单片机主要完成接受道岔送左信息,给电动转辙机发出动作信号。本文引用地址:https://www.eepw.com.cn/article/170483.htm
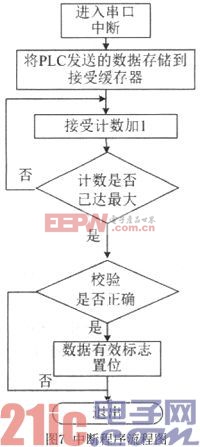
单片机控制程序以接收中断方式判断是否有来自PLC的数据。当确实收到PLC给出的含道岔编号及要求道岔定位或者反位的信息时,需对这一信息进行解析校验,并向PLC返回一校验结果,解析正确后控制电动转辙机执行。图7中断程序流程图
4 上位机设计
上位机主控画面是对整个机车运行系统的真实再现,调度员在调度室内就能实时了解机车运行状态信息,随时对现场设备进行控制。
机车司机通过语音通信给调度员发送机车行车要求,调度员根据整体运行情况,合理确定行车区间。
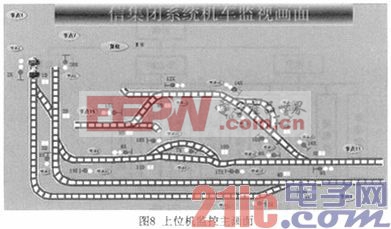
除此之外,还可以通过上位机查询机车的实时运行状态,报警提示等。通过上位机监控画面,调度员能全面掌握井下机车运行状态,增强对突发事件的处理能力,实现电机车高效、安全、流畅的运行。图8给出了上位机监控主画面。
5 结论
本文针对煤矿综合自动化的需求,运用了机车精确定位技术、计算机控制技术、通信技术等,并且运用了无线语音通信功能,填补了信集闭系统的空白点。
本系统对机车定位准确,进路判断快速,区间闭锁严格有效,电机车运行有序、流畅,对煤矿井下特殊条件下的轨道运输系统有一定的指导意义。












评论