对交通信号灯模糊控制的自主创新性设计

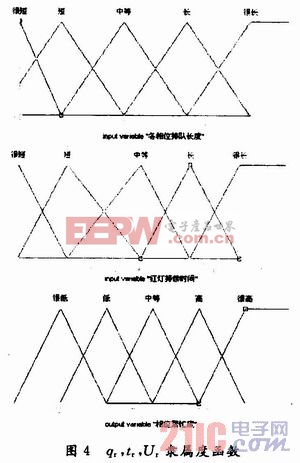
tr的基本论域为[0,120],离散论域为{1,2,3,4,5,6,7,8,9,10,11,12},在离散论域上定义5个模糊子集{很短、短、中等、长、很长};Ur的基本论域为[0,6],离散论域为{1,2,3,4,5,6},在离散论域上定义5个模糊子集{很低、低、中等、高、很高}。
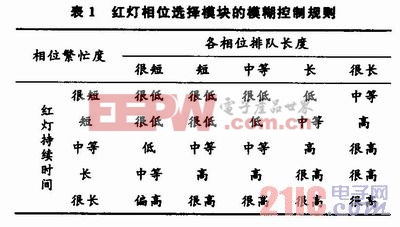
qr,tr,Ur模糊子集的隶属度函数如图4所示,模糊控制规则如表1所示。本文引用地址:https://www.eepw.com.cn/article/162432.htm
3.2 第二级模糊控制器的设计
该模糊级为确定绿灯延时模块,该模块为双输入单输出模糊控制,其中两个输入为:当前繁忙度最大相位的排队长度(dc)和该相位与繁忙度第二大相位的排队长度的差值(长度差xc),输出为该相位的绿灯延时(tL)。
假定每个相位的最小绿灯时间Gmin=10 s,则相位绿灯总时间Gtime=Gmin+tL。
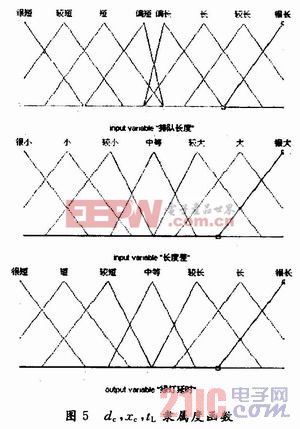
dc的基本论域为[0,30],离散论域为{1,2,3,4,5,6,7,8,9,10,11,12,13,14},在离散论域上定义8个模糊子集{很长、较长、长、偏长、偏短、短、较短、很短);xc的基本论域为[0,30],离散论域为{O,1,2,3,4,5,6,7,8,9,10,11,12},在离散论域上定义7个模糊子集{很大、大、较大、中等、较小、小、很小};tL的基本论域为[0,50],离散论域为{1,2,3,4,5,6,7,8,9,10,11,12,13},在离散论域上定义7个模糊子集很{很长、长、较长、中等、较短、短、很短}。
dc,xc,tL模糊子集的隶属度函数如图5所示,模糊控制规则表见表2。





评论