对交通信号灯模糊控制的自主创新性设计

4 仿真研究
为了验证新型两级模糊控制器的控制效果,用Matlab结合VB编写了新型两级模糊控制的仿真程序,并与当前广泛运用的感应控制和定时控制进行了比较。假定路口各方向车辆到达交叉口是随机的且服从均匀分布,利用VB中的随机函数产生12个方向车流每秒钟到达的车辆数,到达率为0~0.4辆/s,设某车流红灯转变为绿灯后车辆以1辆/s的速率离开等候的车队,以通过交叉口的平均车辆延误作为评价指标。分别对新型模糊控制、感应控制和定时控制在不同的交通条件下各进行10次仿真比较,每次仿真时间均为1 200 s,10次仿真的平均结果如表3所示。

从仿真结果表3中可知,采用新型两级模糊控制方法从整体控制效果上看,在平均车辆延误上比感应控制方法提高了13.290 8%,比定时控制方法提高了22.820 1%,可见优势明显。
5 动态模拟演示
为了使其更具可观性与实用性,更易于运用到交通现场,我们还对新型两级模糊控制进行了动态模拟演示。其动态模拟演示图如图6所示。
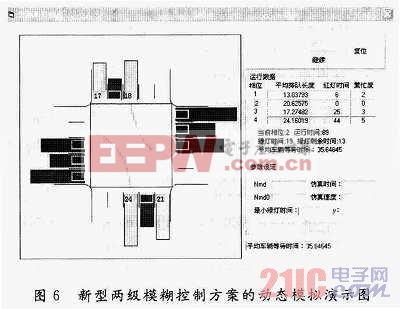
可以对交通参数进行随意设定从而实现不同情况下的动态模拟,在演示图中可以通过繁忙度知道下一绿灯相位应为何相位,通过当前相位可以知道正处于绿灯的相位,且由绿灯时间可知整个相位的总绿灯时间,由绿灯剩余时间可以准确的知道其剩余绿灯时间。这样就使新方案更具可观性与实用性。对于实际交通流时,只需把检测到的实时数据输入,通过新型两级模糊控制器就可以实现实时在线控制了。
6 结语
本文确定当前相对最优的交叉口平面几何设计与相位设计,并设计出一种更适用于实际情况的新型两级模糊控制方案。另外,利用Mat-lab软件和VB编程软件对新方案进行了仿真比较,验证了新方案的有效性和优越性,同时还对其进行了动态模拟演示,使其更具可观性与真实性,更易于运用到交通现场。该新方案实用性强、易于推广、利于环保。只需在现有的交通控制系统中把新型控制程序输入其交通控制的微型计算机中,即可实现其实时在线控制,充分发挥了计算机的高速处理与计算能力。也大大降低了交通信号设备的改造费用,具有可观的经济效益。同时,交通流的通畅、车辆排队时间的缩短能有效地减少汽车尾气的排放量,更能适应当前全球的低碳经济计划。



评论