Buck型变换器数字PID控制器设计方法研究

3 Buck 型变换器数字PID 控制器设计实例本文引用地址:https://www.eepw.com.cn/article/162359.htm
仿真用Buck 及全桥变换器的电路参数如表1 所示,数字PWM 脉冲产生器均按D=u(k)/M 设计,其中M=4(M 对应于模拟PWM 产生器的锯齿波峰峰值Um)。
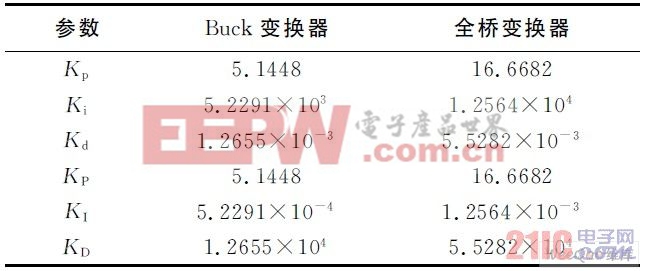
模拟PID 控制器零极点均按照以下方式配置:wc=1/5ws ,wz1 =wz2 =1/2wp ,则模拟及数字PID 控制器整定参数如表2 所示,采样周期T=1×10-7s 。
表1 仿真用Buck 及全桥变换器电路参数

表2 仿真用Buck 及全桥变换器模拟及数字PID 控制器整定参数
根据图1 所示的数字控制Buck 变换器系统框图,依据电路参数及数字PID 控制器整定参数,在MATLAB/SIMULINK 仿真环境中建立数字控制Buck 及全桥变换器仿真模型,仿真结果如下:
额定负载条件下,数字控制Buck 及全桥变换器输出电压响应如图4 所示。
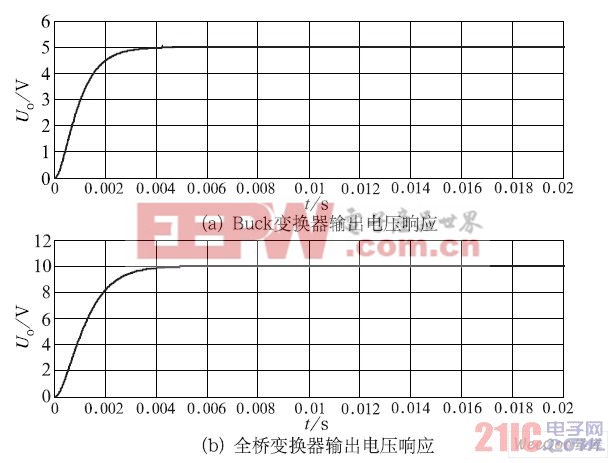
图4 额定负载条件下输出电压响应
额定负载突变至50 %额定负载条件下,数字控制Buck 及全桥变换器的输出电压响应如图5 所示。

图5 负载突变情况下,输出电压响应
4 结 论
仿真结果表明,采用频域补偿设计方法整定模拟PID 控制器参数进而通过连续系统离散化方法设计实现的数字PID 控制器,能够满足Buck 型变换器系统的控制要求,输出响应具有良好的静态与动态特性。

pid控制器相关文章:pid控制器原理








评论