基于PLC的摊铺机行走控制系统纠偏算法研究

4 现场测试
4.1 现场测试
将此纠偏控制算法应用于新筑公司MT12000型摊铺机的行走系统控制中,将发动机转速设定为2200r/min进行控制效果测试。

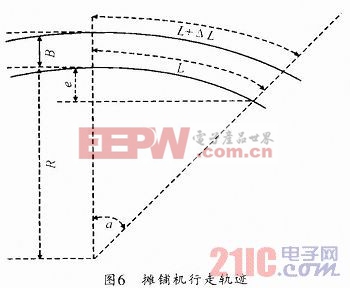
测试方法:每项测试距离为履带长度的2-5倍(即17米-42.5米),发动机工作在额定转速,在摊铺机两侧的机架及相邻履带设定试验的起始基准,启动发动机,转向控制器置于零位,使摊铺机按某一作业速度向前直线行驶,到达终点后停机,分别测量左右距离差的绝对值,来计算相对的跑偏量。
摊铺机试验过程轨迹图如图6:

不采用纠偏算法在不同的速度设定值下得到的结果如表7。
从以上表6、表7的对比测试结果可以看出,利用此纠偏控制算法使MT12000型摊铺机的直线度跑偏量控制在0.4%以内,大大提高了摊铺机的行驶直线度性能,改善了摊铺机的整体控制效果。
5 结束语
沥青混凝土摊铺机行驶系统的直线度性能的提升是改善路面施工质量的重要途径之一,单纯依靠模糊PID控制可以提高机器的行驶恒速性能,但难以保证左右履带行程的一致性,从而无法确保机器的行驶直线度。本文探讨了在模糊PID控制的基础上加上左右里程关联的方法,并将其应用在摊铺机的行驶系统控制中,用以提高摊铺机的直线行驶效果。对比测试结果表明,用此纠偏控制算法获取的直线行走效果在原有控制效果的基础上提高了0.5%左右,在很大程度上提升了摊铺机的直线行驶性能。

pid控制器相关文章:pid控制器原理











评论