基于加速度模糊控制下的异步电动机双馈系统分析

摘要:随着速度调控策略的不断深入与发展,希望以高精度实时控制解决异步电动机控制的要求被提上议程,特别在电动机加减速情况下,这种对于改善电流畸变和异步电动机稳定性的要求就更加强烈。文中提出了在加速度模糊控制下的加速度一速度双馈闭环调控策略,通过仿真验证了该策略能有效改善电动机运行过程中的局部粗糙,使输出波形与运行特性平滑稳定。
关键词:加速度;模糊控制;双馈
加速度作为考察电动机运行过程的重要参数,能有效反映电动机突然加减速下的不稳定状态,为避免由于这种不稳定所产生的不良效果提供了信息。一方面,加速度传感器克服了电动机振动及电动机型号不同时的测量误差与光学元件价格昂贵和安装距离要求高等不利影响,不仅能有效反映异步电动机的实际运行状况,而且由于加速度的直接测量省去了间接测量后的计算转换误差,在一定程度上保证了测量结果的可靠性及实用性。另一方面,随着异步电动机的广泛应用,人们发现,使用传统速度闭环调控机制,电动机在加减速过程中容易发生速度SPWM占空比加得过大,出现打滑导致空转或加速不够迅速而影响速度的矛盾局面。建立加速度——速度双馈过程是解决这类高精度、实时调控问题的一种有效思路方法。虽然通过以智能控制为基础的一大批控制方式在这方面积极探索,但是基于加速度模糊控制下双馈策略的相关论文还比较鲜见。
引入加速度调控方式最大优势在于能有效改善调控局部精度,配合传统关于速度下的调控策略建立以加速度模糊控制为策略的双馈调控机制,能使电动机整个过程都平缓稳定,结合模糊控制,能有效保证系统的鲁棒性及纠错精度,以期异步电动机的运行品质得以提升。
1 模糊控制和传统速度闭环调控的相关理论
在传统转速闭环矢量变频控制系统中,反馈回路通过异步电动机电流检测引出,结合电流模型法解耦得到转子磁链ψ、磁场定位角θ及转矩电流i,求得电机测量转矩T,与Tω相比较构成转矩反馈。而对电机的供电通路是由带电流环控制的电压源型SPWM逆变器,逆变器电压由三相电压给定,频率则是由异步电动机模型输出ω给定。基于加速度模糊控制下的双馈系统仍是以原始速度环为基础的闭环控制系统,引入加速度模糊控制环是出于对速度环波动不稳、谐波较多等不良情况下的改善,以期通过这种双馈组合能在原控制策略上有一定程度的性能提升。同时,应该注意到a的实质可理解是为了充分利用轴功率,控制加、减速的运行时间,从而在保证达到规定速度的同时,获得节能效果。
但是应该看到,加速度是一个噪声影响性强、变化波动剧烈、非线性的参量,要对其加以控制,传统控制平台已不适用。模糊控制系统是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的一种计算机数字控制,它不需要建立对象的精确数学模型,只要求把现场操作人员的经验和数据总结成比较完善的语言控制规则,因此它能绕过对象的不确定性、不精确性,噪声以及非线性、时变性、时滞等影响,模糊控制系统的鲁棒性强,尤其对像此处a强时变耦合的非线性系统具有良好的适应性。
另外,通过在系统中引入ITAE和P两个性能指标实现稳定性分析,以期能及时准确地观测系统输出跟踪控制输入的变化情况。ITAE是时间乘以误差绝对值积累的性能指标,能够综合评价控制系统的静态和动态性能,同时对多个加权因子进行寻优,离散形式为:
△JITAE=t|E|△T (1)
选取超调量P作为衡量模糊控制的精确度指标,对于期望输出yk,而实际的输出![]() ,则有:
,则有:
![]()
2 关于加速度下的系统设计
图1为加速度调控双馈系统工作流程,该系统主要包括了加速度和速度反馈双环、模糊控制系统、异步电动机及其他相关模块。
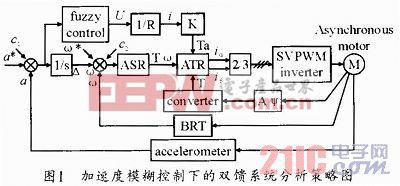
图中ASR:速度调节器,Aψ:磁链调节器,ATR:转矩调节器,BRT:转速传感器,converter:ψ-T转化器,
在此系统中,以电动机加速度和速度作状态空间,建立计算矩阵为:

其中:a’、ω’分别为测量误差,c1、c2分别为处理计算补偿量,为了使结果达到精度所需,以上四个参数均可采用实时修正。dt为时间变化量,为精度考虑可近似认为此量取得极小。









评论