十字路口智能交通灯控制系统的FPGA实现

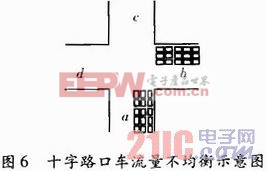
系统主要适应十字路口车流量不均衡的状态,设定十字路口车流量状况为a车道、b车道车流量大,c车道、d车道车流量小,如图6所示。利用EDA软件Quartus II 7.2,通过硬件描述语言VHDL进行模拟设计和仿真,可得此状态下智能交通控制系统的仿真结果,如图7所示。本文引用地址:https://www.eepw.com.cn/article/159773.htm
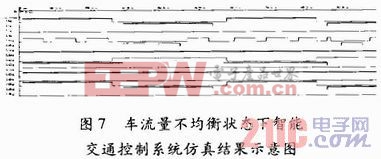
统计图7中100s内a车道、b车道3种车辆通行方向的车辆通行时间,可得a车道、b车道直行方向车辆通行平均概率为(50+40)/200=45%,a车道、b车道左转、右转方向车辆通行平均概率为(46+18+50+57)/400=42.75%。
比较传统模式下的交通控制系统和智能交通控制系统在十字路口车流量不均衡状态下的车辆通行概率,可以发现,道路直行方向的车辆通行概率从33.33%提升到了45%,道路左转、右转方向的车辆通行概率从8.33%提升到了42.75%。因此,在车流量不均衡的情况下,本智能交通控制系统相对传统模式下的交通控制系统,提高了十字路口的车辆通行效率,也满足了预期的设计要求。
4 硬件设计与测试
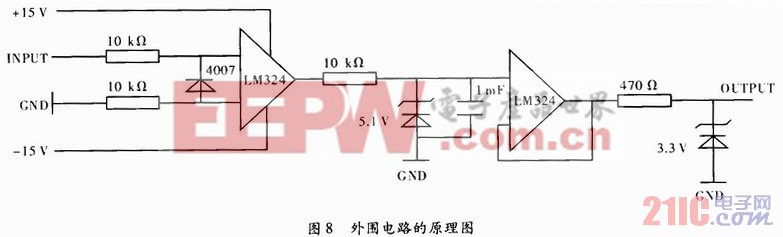
完成了智能交通控制系统的设计、编译、仿真后,将设计程序中输入、输出端口进行引脚绑定并下载到开发板上EP1C6Q240C8核心芯片中。制作外围电路如图8所示,并4路直行方向绿灯信号和4路左转方向绿灯信号接入到开发板上的8个数码管上,调整外围电路的输入电压,观察数码管状态。通过实际测试,8个数码管的显示结果正常,运行稳定、可靠,达到了设计要求。
5 结束语
利用EDA软件Quartus II 7.2,采用硬件描述语言VHDL进行编程,实现了智能交通控制系统的设计、仿真,并利用EP1C6Q240C8 FPCA芯片制作成控制系统进行测试,实现了对交通信号灯相对方向不同步的控制功能,可在实际应用中提高城市十字路口的车辆通行效率,缓解城市的交通压力。本设计具有设计效率高、成本低、可靠性强、维护容易及可扩展性强等优点,展现了EDA技术和FPGA器件在智能交通控制方面应用的优越性。












评论