十字路口智能交通灯控制系统的FPGA实现

2 传统交通控制系统状态分析
当前大部分十字路口的交通控制系统模式,都是根据道路交通状况,事先设定好的红、绿、黄色信号灯时间,来控制整个交通岔路口的车辆通行。目前最普遍的交通控制系统信号灯变化的基本模式如图3所示。
根据此模式下信号灯相位的基本要求,设定直行方向绿色信号灯时间为24 s,左转、右转方向绿色信号灯时间为6 s,黄色信号灯时间统一为3 s。其自动运行状态如表1所示。本文引用地址:https://www.eepw.com.cn/article/159773.htm
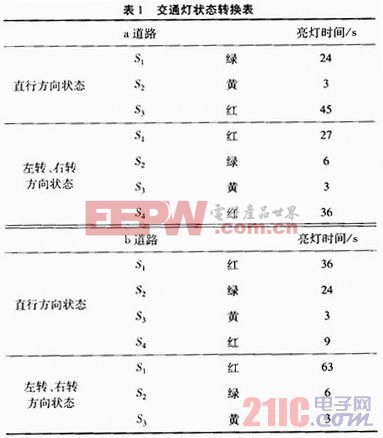
从状态转换表可以看出,以a道路直行方向信号灯状态S1为出发点,3种颜色信号灯不断循环,显示时间为S1+S2+S3=72 s,即为交通控制系统的一个周期时间。通过计算,可得a道路直行方向绿灯时间概率为24/72=33.33%,左转、右转方向绿灯时间概率为6/72=8.33%,b道路状态与a道路相同。无论十字路口车流量状况如何,传统模式下的各个路口和方向的车辆通行概率保持不变。
3 智能交通控制系统仿真
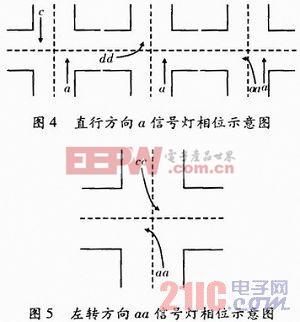
智能交通控制系统相对于传统的交通控制系统,最大的创新点在于,实现了车辆通行相对方向不同步的信号控制,它会根据车流量的变化及时调整交通信号控制策略,最大限度提高了十字路口车流量的通行效率。整个控制电路包括了两个控制模块:直行方向控制模块与左转方向控制模块,右转方向和行人通行时间由直行方向控制模块概括。控制程序运行时,两个模块交替运行,进行循环控制。直行4个方向与左
转4个方向的信号相位分别一致。例如,a方向具体相位如图4所示。aa方向具体相位如图5所示。
控制电路以1 Hz时钟脉冲作为系统时钟,它包含了8路输入信号和48路输出信号,具体信号分布如表2所示。












评论