基于DSP的PMSM矢量控制系统的设计与研究

4 软件设计
在系统设计中,通常总是尽可能地用软件资源代替硬件资源,以降低成本,简化系统结构,该系统软件部分采用C语言编程,主要包括上位机软件和DSP控制程序。上位机通过仿真器与DSP连接,实现了SVPWM波形输出、电流检测、过压保护等功能。DSP控制程序由两个模块组成,即主程序模块和中断服务程序模块。系统主程序流程图如图8所示。
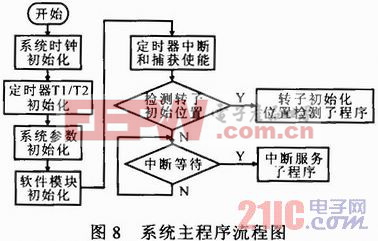
在系统初始上电后,会首先进入系统资源初始化,然后进行PMSM转子初始位置角的检测,得到位置角信息后进入后台处理程序,等待中断处理信号用以进入系统子程序对电机进行控制。中断模块主要是进行速度环和电流环的处理以及与上位机交换数据。
5 实验结果
实验中给定直流母线电压Udc=220 V,PWM采样周期为0.2ms,电机各定子绕组R=3.1Ω,最大转速1000 r·min-1,转动惯量J=0.0036 kg·m2、极对数p=2。实验中电机以空载开始运行,图9a为电机给定转速600 r·min-1时,a,b两相电流波形图,可见,电流波形的正弦性好,精度高,能使电机平稳运行。电机在运行10 s后加2 N·m负载,图9b为电机负载转矩图,电机在空载时,其转矩波形在零附近波动,突加负载后转矩略有波动,但很快就恢复稳定,电机转矩响应时间短。实验结果表明,采用矢量控制实现的PMSM系统具有较好的动静态特性。

6 结论
设计了一种基于TMS320F2812的永磁同步电动机控制器,解决了电机控制中一些实际问题,采用矢量控制法和SVPWM技术对控制器进行了调试,由实验结果可见系统响应较快,控制精度高,稳定性好,证明了该设计的有效性和合理性。











评论