基于DSP的PMSM矢量控制系统的设计与研究

控制电路由上位机、TMS320F2812、光电编码器、霍尔传感器等组成。其中上位机与DSP通过JTAG模块连接,可实现两者间的实时通信:QEP模块连接光电编码器,用来捕获电机转速信息,并由数码管模块显示;A/D模块与霍尔传感器相连,用来检测电路中电压、电流值的大小;事件管理器模块输出6路PWM波,经光耦隔离、功率驱动电路,输出到逆变电路的6个IGBT开关管。
3.1 A/D采样精度分析
TMS320F2812片内A/D模块分辨率为12位,但在实际应用中精度并不高。理想情况下,A/D的采样结果为:y=Gx+b。其中,y为采样结果;x为输入电压;G为增益,G=1;b为偏置,b=0。但是在采样过程中,G并不等于1,b也不等于0,其偏差如图3所示。
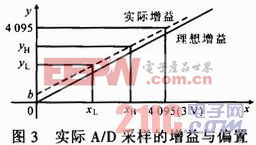
由于A/D采样结果的准确性将直接影响电机控制性能,因此有必要采用矫正电路来提高其转换精度,该系统设计的矫正电路如图4所示。
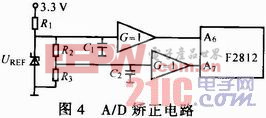
对于同一个排序器。其8个通道的G和b是相同的,如果给定两个通道(如A6,A7)的输入电压,则有:y6=Gx6’+b’,y7=Gx7+b’。由图4可知,A6,A7的给定是通过稳压管和电阻分压得到的,其电压值是已知的,意即x6和x7是已知的。y6和y7可从A/D结果寄存器中读取,由y6和y7,的表达式可以计算得到:
![]()
得到G’和b’后,就可通过y=Gx+b计算矫正后的采样结果。











评论