基于ARM与低成本MEMS器件的AHRS设计

4.2 硬磁及非正交度校正
地磁场正常情况下测量到的三维数据在空间上的包络应该是一个标准的圆球。但是磁场汁测量出来的数据由于受到外界磁场的影响,加上磁阻传感器各轴的标度因子和非正交度,导致传感器采集到的数据在三维空间内分布的包络面为球心偏移原点的椭球面,磁场裸数据三维分布如图4所示。本文引用地址:https://www.eepw.com.cn/article/148911.htm

椭球面约束方程如式(15)所示。
(m-c)T×(mT×U)(m-c)=1 (15)
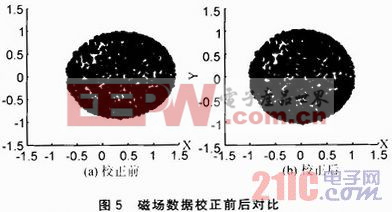
其中m为传感器测得的三维磁场强度,c为球心偏移的三维向量,U为标度冈子及非正交度校矩阵。磁场强度没有实际意义,关心的是传感器测量的地磁三维矢量方向,所以设磁场向量模为1。通过最小二乘法可以计算出U和c。磁场数据校正前后对比如图5所示,左右两图为校正前后数据在XY平面上的投影。
5 实验结果
AHRS放置在与1024线光栅编码器固连的转动平台上,测试俯仰姿态角的测量精度及跟踪性能,AHRS与编码器测量曲线对比如图6所示。
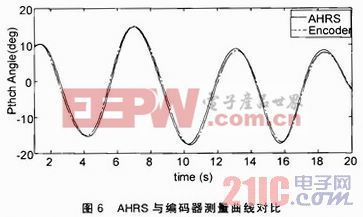
图中实线为AHRS的测量值,点划线为编码器的测量值。当测试平台以幅度约±10°的幅度摆动时。AHRS与编码器测量数据相比在时间上滞后最大不超过5 ms,峰峰值相差不超过0.3°。
结语
基于四元数扩展卡尔曼滤波算法的AHRS具有更新速率高、实时性好、价格低廉的特点,能够广泛应用于手机、平板电脑等消费类电子产品,也能满足一些机器人对姿态控制的测量需求。










评论