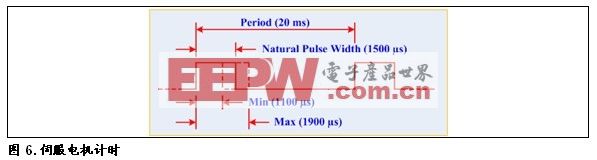
激光制导自动跟踪焊接系统 作者: 时间:2010-08-09 来源:电子产品世界 加入技术交流群 扫码加入和技术大咖面对面交流海量资料库查询 收藏 <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a635e61e&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=88&cb=INSERT_RANDOM_NUMBER_HERE&n=a635e61e' border='0' alt='' /></a> <a href='https://ad.eepw.com.cn/www/delivery/ck.php?n=a576c0a2&cb=INSERT_RANDOM_NUMBER_HERE' target='_blank'><img src='https://ad.eepw.com.cn/www/delivery/avw.php?zoneid=87&cb=INSERT_RANDOM_NUMBER_HERE&n=a576c0a2' border='0' alt='' /></a> 本文引用地址:https://www.eepw.com.cn/article/111530.htm 通过将金属板放置在已知距离上,并使焊枪移动至图像处理计算得到的坐标值,用实验方法得出映射值,然后计算出平均值。在当前的演示模型中,伺服电机1的步长相当于1.43像素。 图内文字: 周期(20毫秒) 自然脉宽(1500微秒) 最小(1100微秒) 最大(1900微秒) 上一页 1 2 3 4 5 下一页










评论