基于离散布置光电传感器的连续路径识别算法

引言
本文引用地址:https://www.eepw.com.cn/article/95524.htm全国高等学校自动化专业教学指导分委员会受国家教育部委托,举办第一届“飞思卡尔”杯大学生智能车邀请赛。在智能车赛事中,路径识别方法主要有两大类,一类是依靠红外光电传感器,一类是依靠摄像头。红外光电传感器以其体积小、价格低廉、安装灵活方便且不受环境可见光干扰等特点得到了广泛的应用。
对于该类传感器来说,相应于不同的路面条件(主要是黑白度),接收管接收到地面漫反射红外线后其两端电压将有所不同,即传感器接收管正对白色路面,则其电压较高,若正对黑色的路径标记线,则电压较低。因此,基于这个原理可以提出一种比较常见的路径离散识别算法:通过普通I/O端口将接收管电压读入单片机,根据端口输入的高低电平逻辑来判断该传感器是否处于路径标记线上方,再筛选出所有处于标记线上方的传感器,便可以大致判断此时车身相对道路的位置,确定路径信息。
这种离散算法简便易行,对硬件及算法要求都比较低,在传感器数目较多的情况下也可以实现较高的识别准确性。但它的一个致命缺陷在于路径信息只是基于间隔排布的传感器的离散值,对于两个相邻传感器之间的“盲区”无法提供有效的距离信息,因此在传感器数目受到限制的智能车赛事中,其路径识别精度极大地受制于传感器数目及其间距。
即使传感器数目不受限制,路径识别精度足够高,离散路径识别算法仍有其难以克服的固有缺陷。由于离散算法得到的路径信息为离散值,如果直接应用到转向及车速控制策略中,势必造成转向及车速调节的阶跃式变化,这将会对赛车的性能产生以下不利影响:其一,转向及车速控制僵硬,对路径变化反应不灵敏,同时易产生超调及振荡现象;其二,舵机输出转角相对于路径为阶跃式延迟响应,对于追求高速性能的高车速短决策周期控制策略来说,很可能因为舵机响应不及而造成控制失效。
为了解决以上问题,一方面可以从路径识别算法上着手,寻找识别精度高,不受传感器数目限制,识别信息连续的路径识别算法;另一方面也可以从控制算法上着手,寻找基于离散路径信息的连续控制算法。本文着眼于第一条思路,提出一种将有限间隔排布传感器采集的数据连续化的方法,来实现连续路径识别。
光电传感器特性
该连续化方法主要是建立在对光电传感器特性的深入研究的基础上。
事实上,红外光电传感器特性并非如前文所述那样简单(白区高电压,黑线低电压),其电压大小与传感器距离黑色路径标记线的水平距离有定量关系:离黑线越近,电压越低,离黑线越远,则电压越高,(具体的对应关系与光电管型号以及离地高度有关),如图1所示。
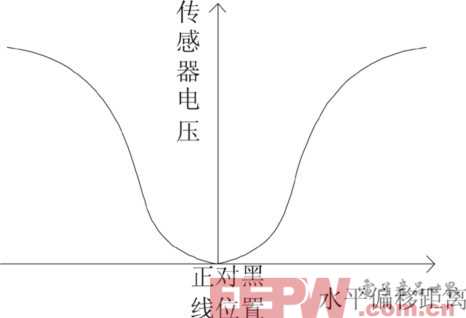
图1 传感器电压与偏移距离关系示意图






评论