一种基于ARM的图像采集与蓝牙传输系统设计

嵌入式Linux系统具有可移植性好、网络功能强、优秀的GNU编译工具、免费的开放源代码等优点。S3C2410处理器是一款采用ARM920T结构,内部资源非常丰富的32位嵌入式处理器。USB摄像头具有低廉的价格,良好的性能,加上Linux下有V4L支持对其编程,很容易集成到嵌入式系统中。蓝牙技术是目前被认可的短距离无线通信技术,广泛应用于手机、电脑以及汽车免提系统。
本文引用地址:https://www.eepw.com.cn/article/248674.htm本文介绍基于嵌入式Linux的USB图像采集系统,并通过构建好的嵌入式Linux下的蓝牙环境将采集到的图片传送到蓝牙手机上,实现监控功能。
1 软硬件平台概述
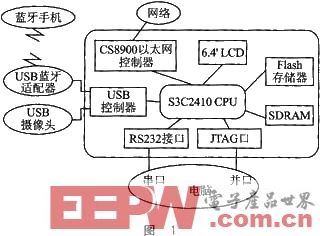
系统硬件平台如图1所示。该平台软件上采用嵌入式Linux操作系统;硬件上采用Samsung公司的S3C2410处理器,另外配置了64 MB的NAND Flash存储器和64MB的SDRAM,通过以太网控制芯片CS8900扩展一个10M以太网接口。引出两个USB主口,一个接USB摄像头,一个接USB蓝牙适配器;将通过USB摄像头采集到的图像数据输出到缓冲区中,保存成文件,并通过蓝牙传输到蓝牙手机上。
2 摄像头驱动
在Linux下已经支持的摄像头驱动是采用ov511芯片的摄像头。使用这款芯片的摄像头有网眼2000/3000等系列,而现在市面上常见的摄像头芯片大多采用中芯微的zc0301、zc0302和zc0303等。Linux内核中并没有相关的驱动支持,但可以从网上下载到相关的spca5xx驱动。
本系统就采用市面上最常用的zc0301p1芯片的摄像头。由于是用于ARM开发板上,可以下载专用于嵌入式Linux的spca5xx-LE驱动,LE版的驱动最大限度地减少了内存的使用,符合嵌入式的需要。将下载的驱动加入到内核中,修改Makefile和Kconfig文件,在内核中选中USB_SPCA5XX,编译后就将摄像头的驱动加入到内核映像中了。
3 Video4Linux简介
Video4Linux(简称“V4L”)是Linux下用于获取视频和音频数据的API接口,配合适当的视频采集设备和相应的驱动程序,可以实现影像/图片采集、AM/FM广播、频道切换等功能,在远程会议、可视电话、视频监控系统中都有广泛的应用。
在Linux下,所有外设都被看成是一种特殊文件,称为“设备文件”,可以像访问普通文件一样对其进行读写。一般来说,采用V4L驱动的摄像头设备文件是/dev/v4l/video0。为了通用,可建立一个到/dev/video0的连接。
V4L支持两种方式来捕获图像:mmap(内存映射方式)和read(直接读取方式)。
V4L在include/linux/videodev.h文件中定义了一些重要的数据结构,在进行图像的采集过程中,就是通过对这些数据的操作来获得最终的图像数据。
4 图像采集
在图像采集过程中,采用V4L的read方式直接读取设备来获取JPEG格式的图像数据,具体流程如图2所示。
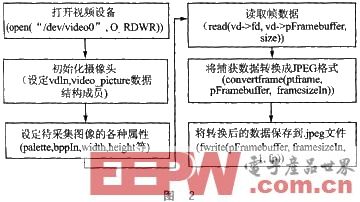
4.1 初始化摄像头设备
指定要操作的摄像头设备文件/dev/video0,调用open()打开该设备文件,将自定义的数据结构vdIn中的成员初始化,包括设备名称 (vd->videodevice)、要采集图像的宽度(vd->hdrwidth)和高度(vd->hdrheight)、像素位数 (vd->bppIn)、帧大小(vd->framesizeIn),为帧数据分配存储空间(vd->pFramebuffer)。

4.2 设定待采集图像的各种属性
zc0301p1摄像头支持JPEG格式的图像采集,定义VIDEO_PALETTE_JPEG为21,将其赋值给图像帧的调色板palette,这是一个必须设置的重要的参数。其他参数(如图像色调、颜色、对比度等)可以先将VIDIOCGPICT传递给ioctl()查看其默认值。
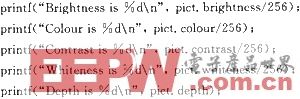
如果发觉以上的参数不符合采集图像的规范,则可以将pict.brightness、pict.colour、pict.contrast、 pict.white-ness、pict.depth等重新赋值,再将VIDIOCSPICT传递给ioctl()来重新设置这些参数。
4.3 进行图像采集
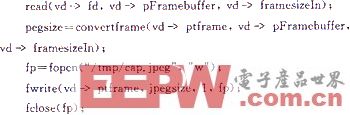
在图像采集过程中,采用read方法直接读取设备文件来获取一帧数据保存到缓冲区中,通过convertframe()函数将 pFramebuffer中的数据转成完整的JPEG格式的数据保存到ptframe缓存中去,再调用fwrite()函数将pt-frame缓存中的 JPEG格式数据写入到指定的文件中去,即得到一幅JPEG格式的图像。
5 蓝牙传输
蓝牙协议规范遵循开放系统互连参考模型(OpenSystem Interconnection/Referenced Model,OSI/RM),从低到高地定义了蓝牙协议堆栈的各个层次,如图3所示。
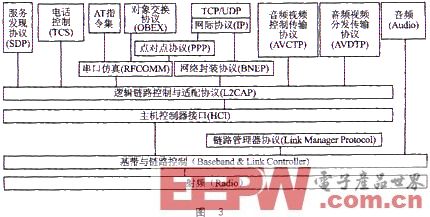
在蓝牙协议体系中,OBEX位于RFCOMM 之上。OBEX提供了对象的表示模型,并通过“Put”和“Get”操作传输对象。设备间的对话遵循客户和服务器间的请求—响应模式。OBEX会话开始由客户端发出连接请求,连接建立成功后服务器发送成功的连接响应,否则发送连接不成功的连接响应。在连接之后,客户端可以通过Put请求向服务器“推送 (Push)”对象,如果对象较大,Put请求可以使用多个Put请求分组,每个请求分组需返回一个Put响应分组。本系统将采集到的图片保存到/tmp/cap.jpeg,现在要将图片通过蓝牙传输到蓝牙手机上。具体实现过程如下:
① 在内核中打上蓝牙补丁,加入蓝牙协议的支持,添加USB蓝牙适配器的驱动。
② 编译bluez的库和工具。从网上下载bluez-libs、bluez-utils和dbus库,用arm-linux-gcc完成交叉编译,得到了arm版的bluez库和bluez的工具以及dbus-daemon工具。这是蓝牙适配器在ARM Linux的环境下正常工作所必需的。
③ 启动USB蓝牙适配器。要使USB蓝牙适配器正常工作,需要用到步骤②中编译得到的dbus-daemon工具和一些蓝牙工具(如hciconfig、hcid等)。dbus是一个消息传递系统,应用程序间可通过它来相互传递消息。dbus-daemon是一个守护进程,是运行hcid所必需的,hcid用来读入hcid.conf文件。该文件是蓝牙设备的一个配置文件,在该配置文件中设置好蓝牙设备的类型、classid、配对码、设备是否可被搜索等其他的属性。
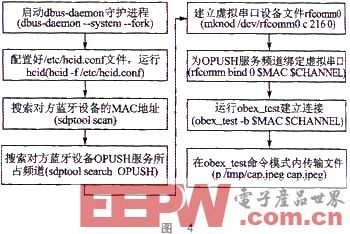
④ 实现文件传输。本系统采用OBEX协议的客户/服务器模式来传递采集到的图片文件,需要用到蓝牙的Object PUSH服务。首先用sdptool工具搜索到蓝牙手机的MAC地址以及Object PUSH服务所占用的频道,然后用rfcomm工具将该频道绑定到虚拟串口,最后运行obex_test完成文件的传输。
图4是采用Object PUSH服务来实现文件传输的流程。
结 语
本设计实现了ARM Linux环境下的图像采集工作,构建了ARM Linux下的蓝牙工作环境;通过蓝牙的OBEX协议和Object PUSH服务,实现了ARM Linux平台与蓝牙手机之间的文件传输。利用嵌入式系统和无线传输实现远程监控,符合数字化、网络化的发展趋势。
linux操作系统文章专题:linux操作系统详解(linux不再难懂)
linux操作系统文章专题:linux操作系统详解(linux不再难懂)
linux相关文章:linux教程
蓝牙技术相关文章:蓝牙技术原理 摄像头相关文章:摄像头原理






评论