基于ARM单片机的汽车电动助力转向系统的研究

摘 要: 在研究了电动助力转向系统(EPS)及其控制器(ECU)结构和工作原理的基础上,设计了基于ARM S3C44B0X单片机的控制系统。通过方向控制电路、H桥电机驱动电路和PWM脉宽调制技术实现对电机的控制。研制的硬件控制器通过了有关的电气性能测试,并采用模糊PD控制策略对EPS原地转向的助力特性进行了仿真分析。
电动助力转向系统(EPS)是汽车工程领域的热门课题之一,目前研究的主要内容为EPS系统的控制规则和硬件控制器(ECU)的设计,而控制规则的实现必须以一个稳定、可靠的控制器为基础。现有的控制器多数基于功能增强的8位单片机,也有的用DSP。目前,以32位处理器作为高性能嵌入式系统开发的核心是嵌入式技术发展的必然趋势。ARM处理器因其具有突出的优点在32位微控制器领域里得到非常广泛的应用,在32位嵌入式系统应用中稳居世界第一[1]。在汽车电子技术领域,从车身控制、底盘控制、发动机管理、主被动安全系统到车载娱乐、信息系统等,都离不开嵌入式技术的支持[2],因此,ARM处理器在汽车电子领域有着良好的应用前景。本文研究了电动助力转向系统(EPS)及其控制器(ECU)的结构和工作原理,并在此基础上研究了基于ARM S3C44B0X单片机的电动助力转向控制系统。
1 EPS工作原理
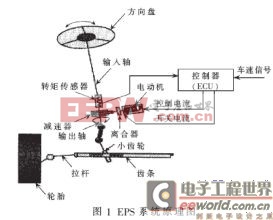
图1是一个典型的电动助力转向系统原理图。当汽车转向时,转矩传感器测出方向盘的输出转矩,送给控制器ECU,控制器再综合由车速传感器送来的车速信号,并根据相应的控制策略确定一个目标电流,控制电动机转动。电动机的输出转矩通过离合器、减速机构施加给转向柱输出轴,并经过齿轮齿条等转向机构的作用使车轮偏转一定的角度,从而起到对转向系统的助力作用。
2 控制器的结构和原理
控制器主要由A/D采集电路、H桥电机控制电路和系统保护电路等组成,其结构如图2所示。当车辆启动后,系统接收到点火信号,开始进入工作状态,采集转矩信号和车速信号并送给单片机。根据已定的控制规则,由系统确定一个目标电流和电机转动的方向,并以PWM调制的方式通过H桥电路来驱动电机转动。同时,系统对电机的输出电流进行采样,一方面将采样结果与目标电流相比较,用以对电机进行控制;另一方面结合车速信号,用以对系统的保护[3]。当电机电流大于设定值或车速高于设定值时,为了保护电机和系统的安全,控制器将对继电器发出一个控制信号,断开电机电源,停止助力,待系统正常后,再恢复助力功能。

3 控制器的设计











评论