研究人员开发出高精度GPS系统

马德里卡洛斯三世大学(Universidad Carlos III de Madrid)的研究人员近日开发出一款汽车GPS导航系统,这款导航系统比之普通的GPS,在对车辆定位性能方面要高出90%,并且其成本低廉,可安装在任何车辆中。这项技术应用前景广泛,今后将能够实现包括:合作驾驶、自动避开行人、碰撞警告等功能。
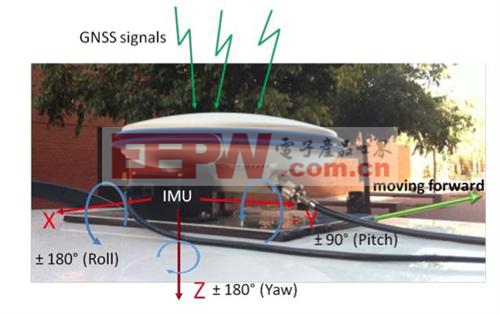
该系统将GPS(或GNSS,全球导航卫星系统)与三个加速计和三个陀螺仪组成的惯性测量单元(IMU,Inertial Measurement Unit)进行整合,在繁杂的城市交通环境下利用卡尔曼滤波(Unscented Kalman filter)检测出物体的位置、速度。该整合型导航系统由应用人工智能组(Applied Artificial Intelligence Group)以及系统智能实验室(Systems Intelligence Laboratory)联合开发。
研究人员称,目前该系统在危机情况下对车辆定位的准确率高达90%,但会稍有浮动,这取决于天气及空气中各种电磁波的干扰强度。
目前商业化的GPS导航仪,在空旷地带,接收器从卫星接受到的车辆位置数据与实际位置偏差大约为15米,而在城市繁杂路况中,定位误差则上升到了50米,这是由于信号反弹时被建筑物、树木、狭窄街道等阻挡。
因此,目前汽车使用的GPS导航仪最大的弊端就是在特殊情况下的信号损失。当车辆驶入隧道中,导航接收器无法收到卫星信号,这时智能交通系统则无法发挥保护行人安全的作用。
目前能够勉强解决这个问题的方法就是利用城市地图对车辆作出大致定位,虽然误差较大,但至少能够使通讯保持连接状态。
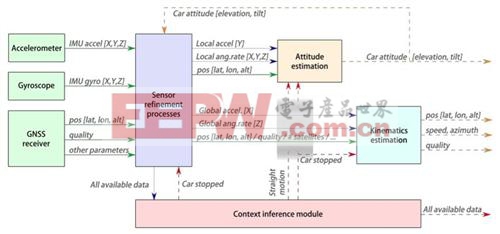
系统结构:通常情况下,左侧传感器中的数据传递至右侧传感器信息细化处理模块(紫色)。大量数据会储存于该模块中并进行前后信息对比,该模块能够访问系统中的所有组件信息,得出的评估结果将传输至右侧评估单元(淡黄色),该单元做出评估后将结果反馈给左侧传感器信息细化处理模块。
图中的箭头代表数据传输的过程,实线代表由传感器捕获的原始数据,蓝色虚线代表经过处理的数据(原始数据经过补偿处理并优化)。其他虚线代表这些数据通过过滤器或其它算法经过加工所得。
该软件利用搜集到的数据进行前后多时刻的对比,再辅以强大的算法,消除由GPS接收机接收卫星信号时的信号损失及瞬时偏差。
目前,研究人员已经开发出一款原型系统,能够安装在任何车辆中。他们的目标是获取尽可能多的路况及位置信息并将它们进行交互,并使之为人们所用。为了达到这一目的,研究人员采用一台光学相机,红外线及激光以检测是否有行人正在车前穿过马路,甚至能够检测驾驶者的嗜睡情况。
他们下一步的计划是将该系统整合入智能手机中,由于智能手机基本都配备了10个以上的传感器,比如加速计、陀螺仪、磁力计、GPS、摄像头、蓝牙等,那么植入该系统将变得更容易。









评论