一种城市安全防护机器人
 加入技术交流群
加入技术交流群

扫码加入
和技术大咖面对面交流
海量资料库查询
0 引言
为保证城市安全,城市中各处都安装着网络摄像头,以此保证意外情况发生时能够及时处理。传统式城市安防监控系统采用定点式烟雾报警器或摄像头,监控方式较为固定统一且灵活性不高。随着城市交通网越来越庞大,城市内市民的活动日趋复杂,传统的定点式安装存在监控死角,已经不能满足当代社会的安防需求。所以需要投放巡防机器人做安保工作,既节省人力又节省财力。因此,人们也在想方设法设计一种智能的巡防机器人用于实际巡防工作中。
现今机器人产品广泛用于科技领域,并以惊人的速度用于各个领域,例如工业、农业、服务业和军事,具有非常广阔的市场前景。随着我国制造业快速发展,城市安全成为人们关注的话题,投入一种能满足当今时代的信息化,智能化控制要求且保证城市安全的机械设备尤为重要。本文设计的一种城市安全防护机器人对未来城市智能化有着很大的意义和价值。
1 总体设计
城市安全防护机器人系统由机器人运动部分、电脑监控控制部分、手机数据监控部分3 部分组成。首先3个部分需在同一网络环境下,由机器人运动部分搭载的树莓派建立服务器,完成物联网的主服务器端,电脑端及手机端以客户端的形式连接服务器,进行数据交互。机器人运动部分负责公共场所的移动检测,同时具有激光雷达避障功能,将采集的烟雾数据信息和图像信息返回给电脑监控端及手机端;电脑端显示机器人回传的数据及对机器人的远程控制;手机端可完成便携式的移动监控,该机器人具有视频监控、烟雾检测、事故报警、人脸识别、远程控制等功能,可对复杂的监控死角进行巡视,弥补了传统安防系统的不足,进一步确保了市民和财产的安全。

图1 城市安全防护机器人总体设计框图
2 硬件设计
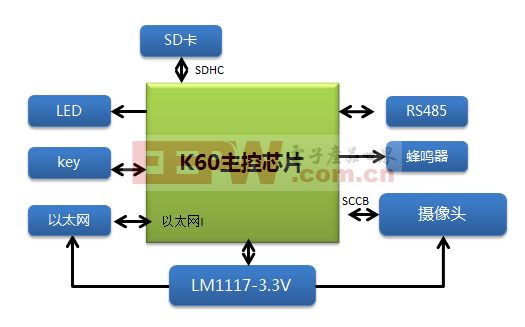
机器人巡防部分安装有负责机器人定位的GPS 定位模块、激光雷达模块;负责数据及图像传输的树莓派;负责检测的烟雾模块及报警器;电脑端与机器人通过 WIFI 的局域网TCP 协议进行通信,可将机器人采集到的数据传输给电脑端,电脑端也可以根据图传传回的图像对机器人进行远程控制,手机端也可进行数据查看。系统硬件如图2 所示。

图2 城市安全防护机器人硬件结构图
2.1 GPS定位模块
车体定位主要由GPS 定位模块实现。模块采用GPS,北斗双模卫星定位的ATGM332D,跟踪灵敏度度达-162 dBm,定位精度达2.5 m,采用UART 作为输出通道,按照NMEA0183 协议格式输出。GPS 定位模块数据输出如下。

图3 GPS定位模块返回数据格式
在GPS 定位模块返回的数据中:“$”为1 帧数据的起始位,“GNGLL”代表数据为大地坐标信息,“4257.29860”代表纬度信息,“N”代表当前定位点位于北半球,“12439.01275”代表经度信息,“E”代表当前定位点位于东半球,“024401”代表UTC 时间,“A”代表当前数据为有效定位,根据返回的数据进行解算:纬度:N 4257.29860 精度E12439.01275纬度= 4257.29860 /100 = 42°,4257.29860%/100 =57′ , 0.29860 × 60 = 17.916″经度=12439.01275 /100 =124°,12439.01275%100 =39′,0.01275× 60 = 0.765″此时的机器人位置位于北纬:42°57′17.916″ ,东经:124°39′0.765″。
2.2 激光雷达模块
激光雷达模块采用思岚RPLIDAR A1 型,8000 次/s为机器人扫描周围的障碍物,从而完成机器人的路径规划,激光雷达的通信采用报文模式,处理芯片须向激光雷达模块发送请求报文后建立通信协议。根据实际测量激光雷达返回数据量庞大,如果将激光雷达数据交由机器人主控芯片处理,可能会影响路径规划等进程的速度。考虑到机器人灵敏度,所以采用STM32F103 芯片专门负责激光雷达的数据采集工作,图4 为STM32F103 的电路原理图。

图4 STM32最小系统原理图
激光雷达连接STM32 的串口通过UART 串口通信完成报文的传输。根据激光雷达数据字节偏移格式进行解算,定义计数变量cNum,数据存储数组cData[]。利用S 位与S 位进行异或再与校验位C 进行与运算,判断数据是否为报头,如果判断报头成立,则进行角度与位置解算,保存角度、距离数据,完成激光雷达的数据获取。
2.3 烟雾传感器模块
机器人安装有烟雾传感器,光强传感器负责火焰烟雾的检测,以防发生火灾情况;烟雾传感器选用MQ-2烟雾气敏传感器模块,采用是在清洁空气中电导率较低的二氧化锡,当检测到可燃气时,传感器的电导率随空气中的可燃气浓度的增大而增大,本设计中采用Arduino为数据采集芯片,Arduino芯片内部集成了 AD转换模块,可采集传感器的模拟量输出,数据采集连接电路图如图5 所示。

图5 数据采集电路连接图
2.4 树莓派及摄像头模块
该机器人需要进行人机数据交互,依据现有的相关模块,可采用WIFI 模块和图传摄像头,烟雾采集数据及对机器人的控制指令由WIFI 模块传输、机器人的图像信息由图传传回电脑控制端,但由于图传信号容易受到干扰,实际工作效果并不能满足后期的图像质量,故采用WIFI、图像与一体的树莓派作为数据传输的载体。Raspberry Pi(树莓派)工作环境基于Linux。本设计树莓派选用3B+ 版本,CPU 为64 位1.4 GHz 四核,WIFI网络采用802.11AC 无线,支持2.4 GHz 与5 GHz 双频,采用串口通信方式与机器人底盘的主控芯片相连接。图像传输由Motion 运动检测实现,可对图像中的运动目标定位追踪。
在进行物联网组网时,首先在树莓派建立一个TCP服务器进行局域网组网,这样在公共场所中保证与树莓派连接相同的网络就能通过TCP 协议与树莓派进行数据通信,Motion 采用8081 视频端口,为了连接方便,数据端口我们采用8082 号,根据树莓派显示页面提供的IP 地址建立连接,这样在此局域网内的客户端均可与树莓派进行数据交互。
为满足机器人夜间的巡视要求,摄像头模块采用树莓派夜视摄像头,在摄像头的两侧各配有红外补光灯,在夜间工作时,红外灯向外发射红外线,遇到物体或者人体时进行漫反射,将红外光线返回到摄像头中,这样摄像头就能如同白天一样采集图像信息,摄像头的红外补光灯可拆卸,保证不同环境的需求。
3 软件设计
3.1 电脑客户端设计
电脑客户端采用Pyqt5 编程语言实现显示页面。具有机器人视频监控、远程控制、烟雾数据监测、定位显示、及报警等功能。
视频监控控制页面可将树莓派传回的图像显示出来,具有人脸检测功能,可对视频中的人脸进行定位,同时将面部信息上传百度智能云,对所有人脸进行统计归档,完成城市公共场所的人员监控,同时具有图片抓拍功能,当图像中出现意外情况,可及时抓拍取证。数据监控页面主要是对机器人传回的烟雾值进行显示,并绘制烟雾值的变化曲线。当烟雾值超过设定值时报警指示灯会变成红色,并发送手机报警信息,由安全管理部门当即了解情况,规划决策措施,以保证财产安全。
发送短信机制采用Twilio 云通讯,Twilio 是美国知名的云通讯公司,向用户提供数字化或可编程的语音和消息通信服务,本设计中采用Python 调用twilio.rest 库中的Client 完成发送短信的功能。
定位页面通过调用百度的静态地图 API 完成定位,实时根据经纬度确定机器人的所在位置。如图6 为机器人位置显示,蓝色代表机器人当前位置。百度地图静态图API,可实现把百度地图以图片形式发送回来,在图片控件中进行显示,自需发送HTTP 请求,就可获取位置信息。

图6 北斗定位电脑端显示页面
3.2 手机客户端设计
手机客户端由 APP Inventor 编程完成,启动时输入机器人的 IP 地址,可对机器人的图像信息及烟雾情况进行观测。
3.3 树莓派显示页面设计
树莓派显示页面使用 python 编程完成,可检测树莓派的端口串口连接情况,调节波特率等参数,快速与底盘建立连接,同时可建立TCP 服务器,如图7 所示,此时树莓派的IP 地址位192.168.43.155,端口为8082,电脑及手机端连接此IP 就可完成通讯连接。
4 结束语
现如今城市交通网络日趋复杂,人们的活动范围逐渐扩大,必然导致一些不可避免的如火灾、遇险等多种危害人身安全及财产安全的情况。功能单一的定点式监控不能实现即时的安保工作。

图7 树莓派显示页面
本设计成功实现机器人的远程控制,图像传输,烟雾值传输,火焰报警等功能。通过电脑上位机遥控机器人运动,实时显示烟雾变化情况,定位机器人,同时可对返回的图像进行人脸检测,信息存入百度智能云端,监控公共场所人员流动情况,有灵活性强,应用效用高,节省公共资源与当今信息化紧密结合等优点,对城市的公共安全监控具有重要意义。
参考文献:
[1] 城市安全物联网建设与应用[J].通信世界,2020(28):28.
[2] 黄佳,杨志坤.基于“北斗+物联网”的城市危险源安全监测体系[C].卫星导航定位与北斗系统应用2019—北斗服务全球融合创新应用,2019:194-199.
[3] 严鹏香.物联网技术在城市安全管理领域的应用及前景[J].决策探索(中),2019(1):18.
[4] 杨建栋.面向城市生命线管理的物联网关键技术研究与应用[D].北京:北京工业大学,2016.
[5] 何焕耀.物联网技术在城市安全监控领域的应用研究[J].电子技术与软件工程,2016(2):11-12.
[6] 葛雷,秦秀媛.物联网技术在城市安全监控领域的应用研究[J].电子技术与软件工程,2013(8):18.
(本文来源于《电子产品世界》杂志2022年12月期)





评论