基于模糊PID混合控制等离子体手术电源的设计与研究

0 引言
低温等离子手术电源已经应用于各种临床手术中,西杰公司在这一领域已经达到MHz 的阶段,而我国尚处于起步阶段,设备大多依赖进口,价格昂贵,不利于等离子手术系统在我国的普及。论文[1]提出等离子激励电源绝大多数为高频高压电源,而为了减少手术过程中造成污染,等离子体电源为双极性电源,激发的带电粒子在电极之间快速运动。文献[2]论文提出了一种基于Buck 电路的调压设计,在系统的稳定控制方面还有要改进的地方,本文借鉴了论文[3]中提出的基于伸缩性模糊PID 控制方法,对PID控制参数中的Kp 参数做模糊化处理,并通过论文[4]提出的ZN 整定算法表格对传统的PID 参数进行整定计算,为了保证系统输出信号不受其他信号的干扰,参照论文[5]提出的EMI 滤波器对输入电源进行隔离。在实现系统平稳输出的同时,实现系统的快速调节。论文从电源系统的整体结构对调压电路进行详细介绍,为了提高系统的调节速度,在调压电路中引入模糊控制算法对参数进行整定,并在逆变环节设计不同频段的电压输出,使得系统功能更加丰富,以满足对人体不同组织和不同环境下的手术需求。最后通过Simulink 软件进行仿真验证。
1 系统整体设计
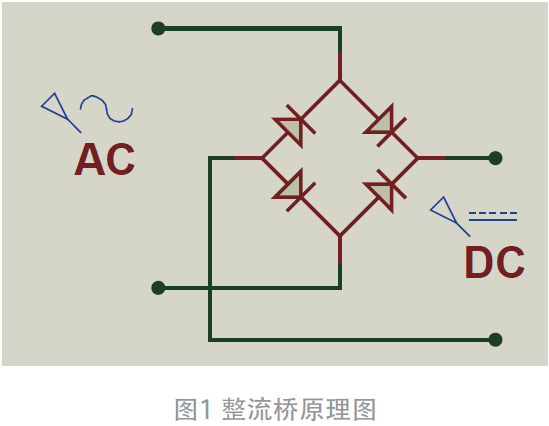
为了实现电源系统设备小型化、系统高稳定性以及功能的多样化目标,低温等离子体电源系统主体电路设计原理图设计如图1 所示。

系统为220 V 工频输入,为了避免系统被大电网中的高频电压影响,在系统的前级通过EMI 滤波电路,并且通过环形变压器转换为系统需要的交流电。系统的主体设计主要分为3 个环节:AC-DC 整流环节、DC-DC 调压环节、DC-AC 逆变环节。在AC-DC 环节采用的是全桥整流电路,通过滤波环节产生平滑的直流电,然后通过可控升压电路将输入的电能升压调到所需要的幅值。此外,通过后级的全桥逆变电路将直流电逆变为系统需要的高压交流电。在临床医学中,等离子手术的主要作用为切割、消融、止血。不同类型的功能对应不同频率和电压输出,系统设计通过控制全桥逆变电路中MOS 的开关频率来控制输出电压的频率,实现系统的多功能输出。
2 直流调压电路参数设计
设计的直流调压环节采用的是Boost 电路。在Boost电路中选定输入电压为40 V 来计算各参数,此时稳态占空比D 为0.6,输出电压为U0 = 100 V ,开关频率为100 kHz。则周期T =10−5 s为保持输出电流连续,设电容电流增量为ΔI,应有I < Imax ,其中Imax =1 A:输出电流应小于1 A,取I = 0.8 A作为计算,R =125 Ω。
电感L:

为了系统能够稳定地输出,在电路设计中取电感L = 70 μH。电容 C 在做计算时,考虑到电压纹波小于0.1%,即ΔU = 0 0.1 V ,因此,通过公式 计算电容 C。为了提高输出波形质量,取C = 4.72 μF。
计算电容 C。为了提高输出波形质量,取C = 4.72 μF。
3 Boost电路中模糊PID混合控制设计
模糊化控制原理如图2 所示。

为了保证系统快速反应,并且能够使输出调节更加快速,通过比较得出误差,并将误差e 和误差变化率进行模糊化,通过模糊算法得出实时变化的Kp 控制信号,并通过ZN 整定算法,计算Ki , Kd 参数。与论文[6] 闭环控制相比,系统简单,响应速度更快,从而实现了Boost 调压电路的快速稳定控制。
3.1 模糊算法整定Kp参数
对PID 中的Kp 参数进行模糊化控制。模糊化控制是将输入值与设定值ec 作为输入进行模糊化处理,通过解模糊化生成精确的系统控制值。本文从模糊控制规则、对模糊化处理的相应隶属度函数,以及解模糊化3 个方面介绍整定过程。模糊控制规则需要建立模糊控制规则表,将模糊系统的输入模糊规则设计为NB(负大)、NM(负中)、NS(负小)、ZO(零)、PS(正小)、PM(正中)、PB(正大)七个模糊规则,并建立模糊规则表1。

隶属度函数的建立需要考虑系统输入信号e、ec 的论域,本文采用三角形隶属度函数建立两者的论域均为[−3,3] 。假设表1 中每一个模糊规则的有效域横坐标为[a,c]。

建立三角形隶属度函数的数学模型如下:

其中b 为隶属度函数有效域的中间值,如表2 所示,μi(b)=1。在有效域之外, μi(x) = 0。通过上述的模糊规则划分区域。建立相应的隶属度函数。规则函数图像如图3 和图4 所示。

通过模糊规则对实时变化的误差进行模糊推理并输出Kp 参数,推理过程称为解模糊化。本文采用重心法解模糊化,离散型二维重心法公式如下:

其中ei(x)、eci(y)表示输入量e、ec 按照不同模糊规则集的隶属度函数。其中xi 表示对应隶属度的横坐标,i 表示所属模糊规则,取值范围为[1,7] 。通过模糊算法的解模糊化过程输出的精确Kp 参数与通过ZN 整定算法的Kp ,与临界震荡周期Tcrit 之间的关系计算Ki ,Kd 的值,实现对Boost 电路占空比D 的模糊闭环控制。
3.2 ZN整定算法整定Ki,Kd参数
ZN 整定算法通过Kp 与临界震荡周期Tcrit 的关系计算Ki , Kd 参数。本文通过状态空间法建立Boost 电路的数学模型,得到占空比到输出信号的传递函数Gvd(s),则Gvd(s) 的传递函数为:

Boost 电路由主电路、PWM 调制网络和反馈网络构成,建立系统的开环传递函数G(s),开环状态下系统为线性定常系统。建立系统的Boost 电路的传递函数如下:
![]()
带入系统额定工作参数:

则系统的闭环传递函数为:

根据劳斯稳定性判据,当系统产生不稳定震荡时,即 9.4×109 − 2.6×1010 K = 0 时。 KPcrit ≈ 0.038 时产生临界震荡。其中临界震荡周Tcrit =1.52×10−3 s。通过临界震荡周期与模糊算法整定的Kp参数关系表计算Ki、Kd的值。

按照临界震荡周期与PID 参数表关系计算可得:

通过ZN 正定算法计算出Ki 、Kd 两个参数的值,并输出稳定的电压信号。
4 仿真验证
本文通过仿真软件Simulink 建立仿真模型。构建仿真模型,并对上述模糊控制系统进行仿真。
4.1 混合模糊PID算法仿真
系统通过控制Boost 电路控制系统输出电压的幅值[6],本文采用模糊PID 控制算法控制Boost 的输出电压值。PID 对系统有滞后和超前校正的作用。在低频频段有积分的作用,能够有效地改善系统的动态性能。而在中高频频段有微分的作用,能够有效地改善系统的动态性能。模糊控制能够对系统的输出效果进行评估,按照上文建立PID 的比例、积分、微分环节。建立双输入、单输出的模糊控制器如图5 所示。

按照模糊规则建立模糊控制器,对输入e、ec 与输出Kp 建立模糊关系。通过模糊规则表确定输出与输入之间的关系,并建立模糊规则如图6 所示。

建立Simulink 仿真模型,如图7 所示。

图7 模糊控制器模型
系统输出的方波如图8 所示,其中靠下的橙色曲线为模糊PID 输出曲线,中间的蓝色曲线为传统的PID 输出曲线。

图8 传统PID与模糊器输出曲线对比
可以看出,模糊控制器的调节时间比传统PID 要快,并且输出稳定。
4.2 系统输出信号仿真
控制后级全桥逆变电路中MOS 管开通与关断,用以获得电源需要的高频方波信号,为了达到系统功能多样化的需求,控制方式和论文[8] 相似,可以通过改变PWM 波的频率来实现不同频率的输出。以输出80 V 、100 V 、120 V 分别对应的100 kHz 、310 kHz 为例,输出高频高压方波信号,如图9 所示。

5 结束语
系统整体采用全桥整流、Boost 调压和全桥逆变电路将220 V 工频电源转化为等离子手术电源所需要的高频、高压的方波波形电源。与传统等离子体电源相比,设计更加注重系统的集成化,并且通过芯片和外围电路改进了在DC-DC转换环节。未来还需要对更高频率、更高稳定性的电源系统进行研究与开发。
参考文献:
[1] 安治永,李应红,宋慧敏.用Matlab/Simulink仿真等离子体激励器电特性[J].高电压技术,2008(1):91-94,122.
[2] 林滑.多波形输出的等离子手术系统开发[D].杭州:杭州电子科技大学,2016.
[3] 杨超,苑红,余岱玲,等.Boost变换器的变论域模糊自适应PID控制研究[J].电能质量,2016(18):53-57,78.
[4] ZHOU M,ZHAO Y,YAN J,et al.Study on conducted EMI noise source modelling applied in electromagnetic
compatibility analysis based on GA in cooperation with LM[J].2020, 13(5):927-935.
[5] 程功.基于预测PI控制的Boost电路控制算法研究及设计[D].上海:东华大学,2017.
[6] 楚冰清,郭琳.Boost型APFC电路的双闭环控制研究[J].微型电脑应用,2019,35(12):45-47.
[7] 赵会超,贺达,孙怡恺.一种等离子体装置小功率高压电源的研制[J].轻工科技.2020(9):82-83,102.
[8] BISSON R,HODILLE E A,GASPAR J,et al.Deuterium and helium outgassing following plasma discharges i n WES T : D e l a y e d D o u t g a s s i n g d u r i n g D - t o - H e changeover experiments studied with threshold ionization m a s s s p e c t r o m e t r y [ J / O L ] . N u c l e a r m a t e r i a l s a n d energy,2021,26(March):100885.https://doi.org/10.1016/ j.nme.2020.100885.
(本文来源于《电子产品世界》杂志2021年9月期)

评论