关于PWM“死区”时间知识解析

pwm是脉宽调制,在电力电子中,最常用的就是整流和逆变。这就需要用到整流桥和逆变桥。对三相电来说,就需要三个桥臂。以两电平为例,每个桥臂上有两个电力电子器件,比如igbt。这两个igbt不能同时导通,否则就会出现短路的情况。
本文引用地址:https://www.eepw.com.cn/article/201808/387008.htmpwm是脉宽调制。
在电力电子中,最常用的就是整流和逆变。这就需要用到整流桥和逆变桥。对三相电来说,就需要三个桥臂。以两电平为例,每个桥臂上有两个电力电子器件,比如igbt。这两个igbt不能同时导通,否则就会出现短路的情况。
因此,设计带死区的pwm波可以防止上下两个器件同时导通。也就是说,当一个器件导通后关闭,再经过一段死区,这时才能让另一个导通。
死区,简单解释:
通常,大功率电机、变频器等,末端都是由大功率管、IGBT等元件组成的H桥或3相桥。每个桥的上半桥和下半桥是是绝对不能同时导通的,但高速的PWM驱动信号在达到功率元件的控制极时,往往会由于各种各样的原因产生延迟的效果,造成某个半桥元件在应该关断时没有关断,造成功率元件烧毁。
死区就是在上半桥关断后,延迟一段时间再打开下半桥或在下半桥关断后,延迟一段时间再打开上半桥,从而避免功率元件烧毁。这段延迟时间就是死区。(就是上、下半桥的元件都是关断的)死区时间控制在通常的低端单片机所配备的PWM中是没有的。
死区时间是PWM输出时,为了使H桥或半H桥的上下管不会因为开关速度问题发生同时导通而设置的一个保护时段,所以在这个时间,上下管都不会有输出,当然会使波形输出中断,死区时间一般只占百分之几的周期。但是PWM波本身占空比小时,空出的部分要比死区还大,所以死区会影响输出的纹波,但应该不是起到决定性作用的。
DSP里的PWM死区
在整流逆变的过程中,同一相的上下桥不能同时导通,否则电源会段路,理论上DSP产生的PWM是不会同时通,但器件的原因PWM不可能是瞬时电平跳变的,总是梯形下降的,这样会可能使上下桥直通,为此,设一个极短的时间,上下桥都关闭,再选择性开通,避免了上下桥直通,实际控制中死区会导致控制性能变差。
PWM的上下桥臂的三极管是不能同时导通的。如果同时导通就会是电源两端短路。所以,两路触发信号要在一段时间内都是使三极管断开的。这个区域就叫做“死区”。
PWM的占空比决定输出到直流电机的平均电压。
PWM不是调节电流的。PWM的意思是脉宽调节,也就是调节方波高电平和低电平的时间比,一个20%占空比波形,会有20%的高电平时间和80%的低电平时间,而一个60%占空比的波形则具有60%的高电平时间和40%的低电平时间,占空比越大,高电平时间越长,则输出的脉冲幅度越高,即电压越高。如果占空比为0%,那么高电平时间为0,则没有电压输出。如果占空比为100%,那么输出全部电压。
所以通过调节占空比,可以实现调节输出电压的目的,而且输出电压可以无级连续调节。
1.PWM控制的基本原理
理论基础:
冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。效果基本相同,是指环节的输出响应波形基本相同。低频段非常接近,仅在高频段略有差异。
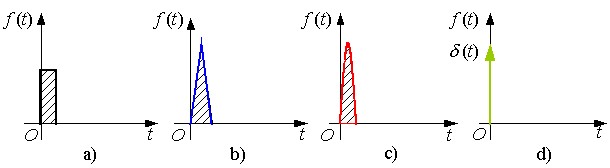
图1形状不同而冲量相同的各种窄脉冲
面积等效原理:
分别将如图1所示的电压窄脉冲加在一阶惯性环节(R-L电路)上,如图2a所示。其输出电流i(t)对不同窄脉冲时的响应波形如图2b所示。从波形可以看出,在i(t)的上升段,i(t)的形状也略有不同,但其下降段则几乎完全相同。脉冲越窄,各i(t)响应波形的差异也越小。如果周期性地施加上述脉冲,则响应i(t)也是周期性的。用傅里叶级数分解后将可看出,各i(t)在低频段的特性将非常接近,仅在高频段有所不同。
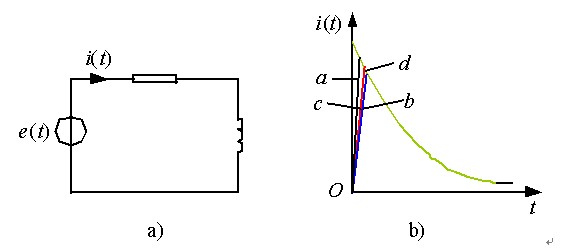
图2 冲量相同的各种窄脉冲的响应波形
用一系列等幅不等宽的脉冲来代替一个正弦半波,正弦半波N等分,看成N个相连的脉冲序列,宽度相等,但幅值不等;用矩形脉冲代替,等幅,不等宽,中点重合,面积(冲量)相等,宽度按正弦规律变化。
SPWM波形——脉冲宽度按正弦规律变化而和正弦波等效的PWM波形。
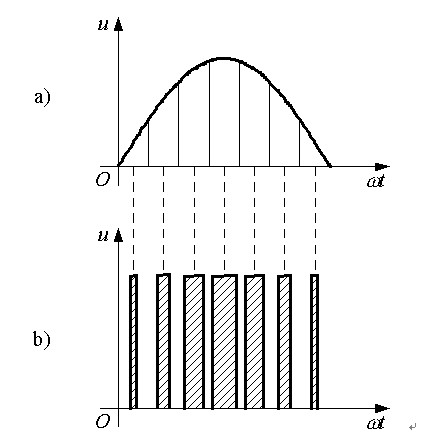
图3 用PWM波代替正弦半波
要改变等效输出正弦波幅值,按同一比例改变各脉冲宽度即可。
PWM电流波: 电流型逆变电路进行PWM控制,得到的就是PWM电流波。
PWM波形可等效的各种波形:
直流斩波电路:等效直流波形
SPWM波:等效正弦波形,还可以等效成其他所需波形,如等效所需非正弦交流波形等,其基本原理和SPWM控制相同,也基于等效面积原理。
2. PWM相关概念
占空比:就是输出的PWM中,高电平保持的时间与该PWM的时钟周期的时间之比。
如,一个PWM的频率是1000Hz,那么它的时钟周期就是1ms,就是1000us,如果高电平出现的时间是200us,那么低电平的时间肯定是800us,那么占空比就是200:1000,也就是说PWM的占空比就是1:5。
分辨率也就是占空比最小能达到多少,如8位的PWM,理论的分辨率就是1:255(单斜率),16位的的PWM理论就是1:65535(单斜率)。
频率就是这样的,如16位的PWM,它的分辨率达到了1:65535,要达到这个分辨率,T/C就必须从0计数到65535才能达到,如果计数从0计到80之后又从0开始计到80.......,那么它的分辨率最小就是1:80了,但是,它也快了,也就是说PWM的输出频率高了。
双斜率 / 单斜率
假设一个PWM从0计数到80,之后又从0计数到80....... 这个就是单斜率。
假设一个PWM从0计数到80,之后是从80计数到0....... 这个就是双斜率。
可见,双斜率的计数时间多了一倍,所以输出的PWM频率就慢了一半,但是分辨率却是1:(80+80)=1:160,就是提高了一倍。
假设PWM是单斜率,设定最高计数是80,我们再设定一个比较值是10,那么T/C从0计数到10时(这时计数器还是一直往上计数,直到计数到设定值80),单片机就会根据你的设定,控制某个IO口在这个时候是输出1还是输出0还是端口取反,这样,就是PWM的最基本的原理了。









评论