汽车LiDAR系统智慧之眼——探测器该怎么选?

据麦姆斯咨询报道,现有LiDAR(激光雷达)系统已被用于从安全应用到测绘,再到工业自动化等各类创新应用。其中,汽车市场对LiDAR系统的发展和应用尤其关注。LiDAR扫描仪是自动驾驶汽车原型系统的关键组件,也是当前交通标志识别、自适应巡航控制(ACC)、盲点检测、防撞系统和车道偏离警告等系统中的关键组件。
本文引用地址:https://www.eepw.com.cn/article/201807/383444.htm在上述所有基于LiDAR的系统中,有一种核心组件不可或缺,那便是LiDAR系统的“智慧之眼”——探测器。
本文旨在简析LiDAR系统原始设备制造商(OEM)设计工程师在各种探测器技术中如何做出选择。
背景
汽车LiDAR系统必须能够快速可靠地感知车辆周围环境,尽可能细节丰富地创建周围环境和前方道路的3D图像。安装在快速行驶车辆上的LiDAR系统,需要能够“看到”前方至少150 m的距离,并探测高度小至10 cm的障碍物。
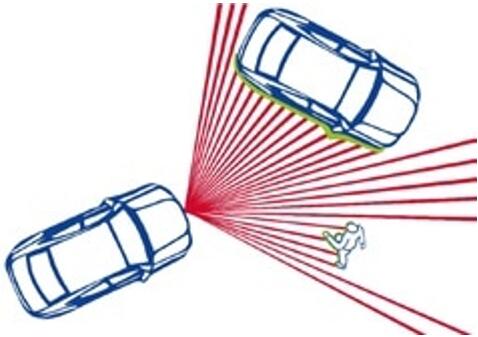
汽车LiDAR扫描系统示意图
上述要点对LiDAR系统的探测器,提出了极具挑战的技术要求。
因而LiDAR系统需要互补但又独立的探测器系统,同时能够确保环境认证和功能安全性。例如,为了适应来自系统其他组件的热量和环境温度,设备的额定工作温度需要达到-40 ~ 125 ℃。并且,为了能够在各种背景噪音中准确“看到并识别”信号,探测器应具有理想的信噪比。此外,光学探测器还需要做好处理不同强度环境光的准备,因此要求探测器必须具有较宽的动态范围。
除了基本的物理定律,LiDAR系统设计人员还需要考虑经济性。汽车中的所有组件都需要成本效益。对于实际应用,最佳的性价比是先进技术能否成功应用的关键。
目前,基本所有采用远距离LiDAR的现有汽车系统都应用了“扫描型”LiDAR设备,可以在整个场景中移动扫描激光束。当前技术的有效探测范围一般为30~300 m。几乎所有的LiDAR系统都使用了905 nm激光器(市场上也有部分企业如Blackmore、Neptec、Aeye和Luminar则正在研究应用1550 nm波长的激光器),该波长的激光器可以低成本地批量制造,发射非可见光高功率短脉冲光束(例如,75 W峰值持续5 ns),提供了理想的功率/成本比。这些激光器已被广泛应用于先进的低成本硅探测器。
选择最合适的探测器技术
随着产业的发展,设计工程师可以为LiDAR系统选择多种不同的探测器技术,每种技术都有各自的利弊。
硅PIN二极管探测器
这类硅基探测器具有三种类型(P型/本征/N型)半导体层叠在一起形成的结构。
它们具有最佳的动态范围,可以处理大幅变化的光。例如,即使面对阳光直射,它们也能够探测远处物体的反射。而且,它们相对经济。
不过,它们没有能力提供大多数复杂汽车LiDAR系统所需要的高水平信噪比和带宽。最后,它们的速度既不快也不够灵敏。
硅光电倍增管(SiPM)和单光子雪崩二极管(SPAD)探测器
这些固态硅基探测器的制造商,最初是为专业的小型医疗和科研应用而打造的。近来,它们正积极尝试在更大的LiDAR市场中寻求应用。
虽然这类探测器在功能性方面类似APD(雪崩光电二极管,下文讨论),但它们针对极高的内部放大或增益进行了优化,使它们能够检测极微弱的光。并且,它们的速度非常快。最后,它们与常用的CMOS技术兼容,因此可以在同一芯片上与相关电子器件耦合。
然而,与APD的灵敏度相比,这类探测器的单光子计数器的灵敏度相当低。因此,他们必须依靠极高的多级倍增。遗憾的是,在倍增过程中,同时也提高了噪声,这通常会显着降低探测器的信噪比。此外,它们的放大机制也会遭受到由高温引起的误触发。
据推测,这类探测器最关键的缺点是它们的高增益是以饱和问题为代价的。
首先,LiDAR探测器需要处理从前方物体反射回来的激光。不仅如此,一些LiDAR系统指定要求宽视场的扫描器。这为SPAD或SiPM探测器增加了大量的光线。此外,LiDAR系统在移动环境中经常遇到的某些状况(例如对方车辆远光灯、明亮的阳光或其他LiDAR系统),可能会使探测器面对超过其处理能力的情况而饱和,即使使用光学滤波器也会如此。

评论