基于计算机视觉的汽车四轮定位技术研究

引言
随着汽车数量的迅猛增长,汽车检测设备的数量和质量都在不断的提高。作为车辆检测的一项重要内容,车轮定位参数检测对整车安全性能的影响举足轻重。如果车轮定位参数不正常,将导致轮胎的异常磨损、行驶跑偏、车轮摆振、转向沉重、油耗增加等问题,直接影响汽车的行驶安全。
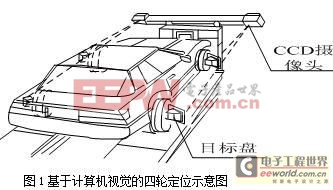
本文引用地址:https://www.eepw.com.cn/article/197412.htm传统的四轮定位仪主要有激光式、红外线式、水准式、光学式和拉线式。而目前国内外汽车检测行业中,最新型四轮定位产品是基于计算机视觉的图像式四轮定位仪。这种定位仪完全基于计算机图像处理技术,只需两个高性能CCD传感器摄像头搭配4个安装在车轮上的目标盘(如图1所示),不需传统的电子传感器,消除了电路可能造成的故障。与传统四轮定位仪相比,大大减少了传感器数量,不必进行反复标定,只需一次标定即可重复使用,操作简单,检测速度快、精度高。
该产品技术先进,目前主要依赖进口,价格昂贵,对其原理国外厂商严格保密,国内尚未见详细报道。因而,对其原理分国外基于透视学的方式和本文基于空间向量的方式进行了详细分析和探讨。并给出了基于空间向量方式的数学模型,通过实车实验验证其有效性。
1、基于透视学的方式
国外V3D定位仪就是使用的这种原理(如美国JohnBean定位仪)。该方法检测时,摄像机拍摄车轮运动(目标盘),经图像处理后将其与已知数据进行比较,根据透视学和解析几何原理,由其目标盘反光斑的位置及大小变化精确计算出目标到摄像机距离和转动角度等几何参数,再通过数据处理后,与基准面对比计算各车轮的定位数据。
1.1 透视学基本原理
这种方法需要应用到透视学中的透视原理和透视缩短原理[3]。透视学是视觉通过假想的透明平面来观察对象,并借此研究在一定视觉空间范围内,物体图形产生原理、变化规律等。
以圆为例,如图2(a)所示,根据透视原理,当圆由远处靠近时,所产生的效果是圆的视觉尺寸会变得越来越大,即相同物体所成图像有近大远小的特点。应用此原理可以测量出到物体的距离;
如图2(b)所示,根据透视缩短原理,当圆沿横轴方向旋转时,其垂直方向尺寸将变得越来越短,逐渐变成一条线段(长度为圆的直径),当继续旋转时,又会由线段逐渐展开成椭圆,最终变回圆形;而旋转过程中,视觉效果里圆的转轴长度(直径)是不变的。因此,由圆高度在外观上的变化,可计算出圆沿横轴方向所转过的角度。同理,也可计算出圆沿纵轴方向所转过的角度。由圆的横轴与纵轴旋转效果的合成,可以计算出圆在空间中任意方向上所转过的角度和其旋转轴的空间位置情况。
1.2 目标距离与转角求取
由于求取定位参数的需要,先要确定摄像机至被观察目标的距离和转角等几何参数,这些可以根据三角函数和基本几何理论求出。
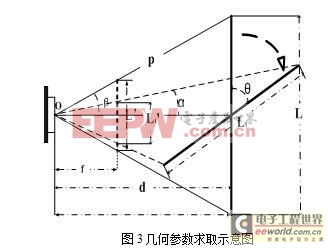
如图3,L为目标初始位置,其成像L’;L1为L旋转θ后位置,其成像L1’。且焦距f和目标实际尺寸L (L1= L)已知,目标在焦距处成像尺寸L’可由透镜成像公式计算出。得式(1)。

当f ,L,L’和p已知后,可得式(2)。

同理,可以求出转动角度θ后的 和α,由α、L1和d进而求出θ。
由以上过程求出距离、成像尺寸及空间旋转角度。
1.3 定位参数求取
此方法目标盘上一般选择圆作为规则图形,这是因为圆具有独特的几何特性,是进行相关参数计算最理想的图形。它是轴对称图形,也是中心对称图形;定位时以车轮轮轴所确定的三个相互垂直平面为定位基准:车身平面、轮轴平面、车轮平面。轮轴平面是主销后倾的基准面;车轮平面是前束角、外倾角及主销内倾角的基准面。
当目标的实际尺寸已知,而摄像机处观测点至目标的距离、成像尺寸和转动角度求出后,可以通过计算得出定位参数数据。
用夹具将目标盘以一定角度安装在车轮上,当车辆前后移动时,车轮及目标盘一起前后转动,通过对目标盘上圆沿其纵轴旋转情况进行检测,可检测出前束角的情况;同时,这一过程中目标盘的对称线将形成一组矢量曲面,转动前后目标盘的两条对称线之间夹角叫矢量角。通过矢量角,可计算出车轮外倾角的情况[4](如图4(a)所示)。
在车辆静止时,(如图4(b)所示),使车轮与目标盘向左或向右转动,检测盘面上圆绕其纵轴的旋转情况可检测出主销内倾角情况;检测圆沿其横轴旋转情况,可检测出主销后倾角的情况。

这种方式原理上比较简单,为国外专利技术,虽对目标盘上图案形状等有一定要求,但推导计算过程简捷而巧妙,容易实现快速的定位,且对定位平台没有严格要求。
2、基于空间向量的方式
该方法为通过对安装在车轮上的目标盘(带有规则斑纹)进行运动前后的拍摄,然后进行图像处理和分析提取出目标盘上的特征点,再根据特征点位置在空间坐标上的变化计算出车轮的空间旋转向量,进而由该向量与空间坐标系各坐标轴夹角关系得出定位参数。
2.1 参考坐标系
计算机视觉中,需要用到世界坐标系、摄像机坐标系和图像坐标系三种坐标系。
世界坐标系(Xw,Yw,Zw)是在环境中选择的一个基准坐标系,用来描述摄像机位置,可以根据描述和计算方便等原则自由选取。对于有些摄像机模型,选择适当的世界坐标系可大大简化视觉模型的数学表达式。
摄像机坐标系(Xc,Yc,Zc)以摄像机镜头光心Oc为坐标原点,Xc,Yc轴平行于成像平面,Zc轴垂直于成像平面,其交点在图像坐标系上的坐标为(u0,v0),即摄像机主点。
图像坐标系是定义在二维图像上的直角坐标系,分以像素为单位和以物理长度(如毫米)为单位两种,这里分别用(u,v)和(x,y)来表示,如图5所示。最常用的是以像素为单位的坐标系,通常其坐标原点一般定义在图像的左上角。
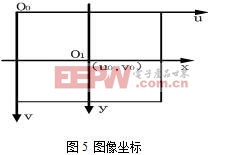
设摄像机CCD每个像素在X轴与Y轴方向上的物理尺寸为dx,dy(该参数由摄像机厂家提供,是已知参数,其比值dy/dx称为Aspect Ratio,即纵横比),由图5可知图像上像素值(u,v)与坐标(x,y)之间的关系是 , ,用齐次坐标与矩阵表示为式(3)。

2.2 摄像机模型
针孔模型是由小孔成像原理推导出来的,是在简单的中心射影(又叫透视投影)基础上加入刚体变换(刚体的旋转与平移)得到的线性摄像机模型。它不考虑各种镜头的畸变,然而它却能很好的模拟实际摄像机,是其它模型和标定方法的基础。
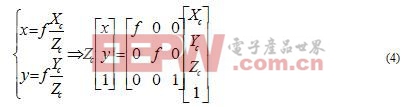
设P是空间某点,其在摄像机坐标系下坐标为(Xc,Yc,Zc);q是P成像平面上的对应点,q的坐标为(x,y),设f为摄像机焦距,则根据透视投影的比例关系为式(4)。
2.3 求取坐标转换关系
作为求解参数过程的一部分,要预先拍摄目标盘,通过提取其图像上特征点的像素坐标得到目标盘特征点的世界坐标。这里将在针孔模型的基础上建立起世界坐标与理想图像像素坐标之间的转换关系。
已知目标盘盘面的几何特征和规则。将世界坐标系建立在盘面上,可已知特征点世界坐标,且Zw=0。设其中一点P(Xw,Yw,Zw)在摄像机坐标系下的坐标为(Xc,Yc,Zc),经拍摄后在CCD图像平面上成像,设其成像点坐标为(x,y),其图像像素坐标对应为(u,v)。
首先是空间坐标系的转换,根据计算机视觉理论,刚体运动可分解为旋转和平移的合成。可将世界坐标系转换到摄像机坐标系并变换为齐次坐标,如式(5)所示。

s是比例因子,H是单应性矩阵。由此可建立起图像坐标与世界坐标之间对应关系。再将已知的目标盘特征点世界坐标和提取出的图像像素坐标代入式(9),求出它们的转换关系,以用于后续计算。
2.4 定位参数求取
车轮的运动也可以看作是刚体运动,车轮上某点(由于目标盘与车轮运动相同,我们研究的是固定在车轮上的目标盘上某点)的运动分解成一个绕旋转轴的旋转和平移。
设车轮(目标盘)运动前后的一对对应点是P和P’,它们的世界坐标系坐标分别是(Xw,Yw,Zw)T和(Xw’,Yw’,Zw’)T,那么变换公式为式(10)。

其中R,T与式(5)中的表达形式完全相同,但其含义已经发生变化,这里用来描述在不同空间位置的变换过程,R中的θ为车轮上点绕旋转轴转动角度,(n1,n2,n3)为车轮旋转轴的空间向量;而式(5)中R,T是用来描述摄像机坐标系与世界坐标系之间的变换关系。
依据2.3所求出的坐标转换关系,将运动前后的空间目标盘世界坐标用其图像坐标求出,然后带入式(10),求出车轮运动的旋转轴向量(n1,n2,n3)。此向量与世界坐标系中各坐标轴Xw,Yw,Zw之间的夹角α,β,γ。进而利用夹角可求出定位参数。
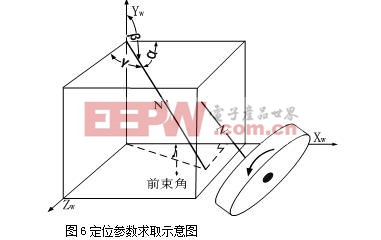
为方便解释,如图6所示,设Zw为汽车前进方向,Xw指向汽车左侧,Yw垂直于车身平面,N车轮旋转轴向量,N’为N的平移,则β-900为车轮外倾角,arctan|cosγ/cosα|×1800/π为前束角。
用相同的方法,拍摄汽车向左或向右转动一个角度时的图像,求取出主销的空间向量,进而求出主销内倾角和后倾角。
这种方式在原理上针对车轮旋转轴及主销,从其向量入手,推导过程虽比较复杂,但计算结果比较直接,对目标盘上图案形状、定位平台等要求较低,容易实现稳定的精确定位。
3、实验结果及分析
进行现场实验,分别用目前最先进的战车(JohnBean)图像式车轮定位仪和本文提出的基于空间向量的测量方法进行了车轮定位参数检测。实验车辆为大众高尔夫2004款轿车,验证本文方法时使用自制目标板,设置的规则图形为国际象棋盘图案,将目标盘固定在前后车轮上。如图7所示为部分实验图像。以对汽车左侧车轮进行检测为例,取多次测量结果平均值作为最终结果,实验结果见表1。从表1结果中可以看出,在误差允许范围内,本文方法测量结果与战车车轮定位仪测量结果基本一致,证明了本文所提出模型的正确性和有效性。

产生误差的主要原因是受自制目标板的精度以及图像噪声的影响,误差还受摄像机分辨率、摄像机标定、角点坐标提取精度等因素的影响。因此,要提高测量精度,目标板必须制作得尽量精确、摄像机的分辨率尽可能高并提高摄像机标定精度。
4、结论
基于计算机视觉的四轮定位方法充分利用了视觉理论,巧妙地运用了空间几何知识,实现了车轮定位参数的精确、快速、方便检测。本文针对基于透视学方式的原理和基于空间向量方式的原理进行了探讨与分析,给出了本文提出的基于空间向量方式的数学模型,实测实验证明了其正确性和有效性。为国内汽车电子检测行业提供了新思路和新技术。










评论