基于FPGA控制的悬挂运动控制系统设计

引 言
在现代的工业控制、车辆运动和医疗设备等系统中,悬挂运动系统的应用越来越多,在这些系统中悬挂运动部件通常是具体的执行机构,因而悬挂部件的运动精确性是整个系统工作效能的决定因素,而在实际中实现悬挂运动控制系统的精确控制是非常困难的。靠改变悬挂被控对象的绳索长短来控制被控对象运动轨迹的悬挂运动控制系统,在生产控制等领域有很广的应用范围,但受技术上的制约,使用也有一定限制。传统的悬挂控制系统设计是采用单片机作为系统控制器,通过软件编程实现各种算法和逻辑控制,但由于其芯片资源有限,运算速率慢和易受干扰等因素,因而在较大系统的开发上受到限制。FPGA可实现各种复杂的逻辑功能,密度高,体积小,稳定性高,运算速度快,还可进行软件仿真和调试,适合作为大规模实时系统的控制核心。本文采用Verilog FPGA设计悬挂运动控制系统的控制器,通过输入模块传送控制参数,采用HDL语言编程实现的控制算法,驱动步进电机,对悬挂运动物体进行精确的控制。
1 系统设计方案
本设计具体设计目标为控制系统能够通过键盘或其他方式任意设定物体坐标点参数,且物体在80 cm×100 cm的范围内做自行设定的运动,运动轨迹既有曲线(圆),也有直线(任意两点和定点),物体在运动时能够在板上画出运动轨迹,限制在一定的时间内完成。根据设计指标,需要实现勾画设定轨迹和对设定轨迹的搜寻功能,并能实时地显示物体中画笔所在位置坐标。其系统方案框图如图1所示。
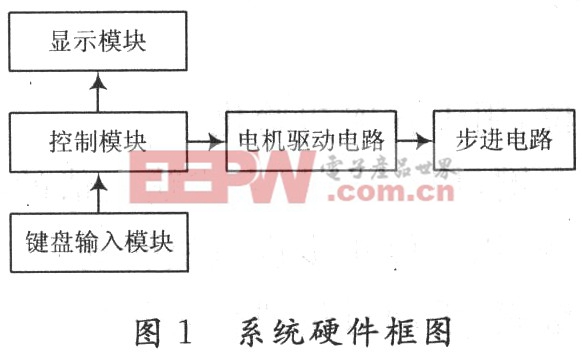
控制模块是整个系统的核心,键盘输入模块产生按键信号,按键信号送人FPGA对物体进行设置校正以及轨迹参数设定,FPGA对送来的信号进行分析、运算、处理,将控制信号输送到电机驱动模块,控制电动机的转速,使物体的运动轨迹得以控制,同时由显示模块显示物体中画笔的坐标。
2 系统各模块的设计与实现
2.1 控制模块
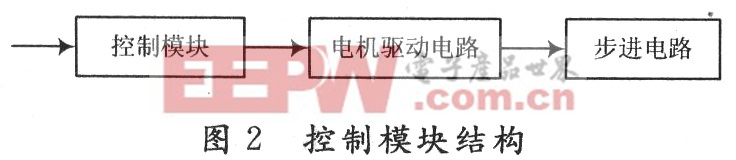
系统结构图如图2所示。其中,控制模块是系统设计的核心,由FPGA实现。此模块是通过HDL硬件描述语言,在智能型可编程逻辑器件开发试验系统KH- 310的硬件平台来控制设计的,利用FPGA芯片可实现对步进电机的控制功能。功能包括:步进电机的正转、反转、定位功能及调速等功能。FPGA由输入的数据来计算物体要移动的距离,直接发出控制脉冲控制电机的转动,进而控制物体的运动方向。由于少了反馈电路,系统的精度只与FPGA采用的算法准确性有关,此种方式电路结构简单,成本低且易于调整和维护,是一种较理想的方式。
2.2 键盘模块
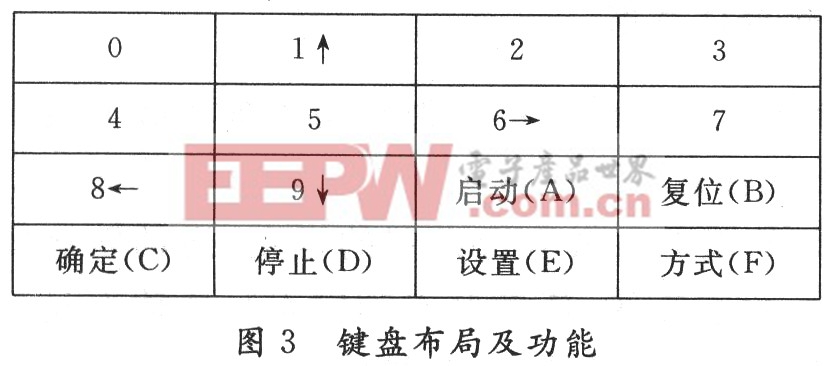
键盘是实现人机交流的一种装置。在本系统中,采用4×4矩阵式键盘共阳极接法。键盘上的每一个按键其实就是一个开关电路,当某键被按下时,该按键的接点会呈现0的状态设置键;反之,未被按下时则呈现逻辑1的状态。键盘各键布局及功能介绍如图3所示。













评论