基于FPGA的空间目标碰撞预警系统

摘要:为了解决空间目标与航天器发生碰撞的问题,设计了一种基于FPGA,以在轨目标三维坐标为待处理数据进行快速并行处理的目标碰撞预警系统。该系统基于Xilinx公司FPGA芯片中的内容可寻址存储器(Content Addressable Memory,CAM)IP核和MicroBlaze软核控制器,利用嵌入式开发套件(EDK)进行搭建;并设计了空间危险目标的筛选算法,同时编写了软件及硬件代码,加载到以上系统中进行实际的操作验证。验证结果表明,该系统实现了16个目标中危险目标的快速筛选功能,通过使用ChipScope逻辑分析工具进行波形分析,可知系统执行一次筛选操作所需时间为1.8 s。
关键词:现场可编程门阵列;Microblaze;内容可寻址存储器;空间目标;碰撞
随着人类航天活动的不断开展,空间碎片的空间密度已经对航天器安全造成了威胁,特别是近地轨道,碎片密度更大,且其数量仍在迅速增加,航天器遭受空间碎片撞击事件时有发生。空间在轨目标数量不断增加,对空间目标进行碰撞预警所需要的计算量也在迅速增加,鉴于并行计算速度很快,因此适合应用并行计算对危险目标进行筛选,进而进行预警操作。利用FPGA中的CAM(内容可寻址存储器)和MicroBlaze软核控制器可以实现危险目标的快速并行筛选。
1 CAM
1.1 CAM概述
CAM是一种特殊的存储器,它是将数据项存储在一个阵列中。每个数据项的位数叫作字宽,CAM中所有数据项的条数叫作CAM的深度。字宽和深度可以表征CAM的容量。
CAM基于内容寻址,通过硬件电路实现快速匹配。CAM的并行处理特性使得它在数据分选领域倍受青睐,被广泛应用于以太网网址搜寻、数据压缩、模式识别、高速缓存、高速数据处理、数据安全和数据加密等。
1.2 CAM工作原理
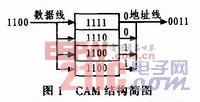
CAM最基本的两个端口是数据线和地址线,数据线作为输入端口,存放需要由CAM来处理的数据,而地址线作为输出端口,输出CAM的处理结果——匹配数据所在地址。图1所示为深度为4、字宽为4的CAM,如果将二进制数1100放在数据线上,输出的匹配结果将会是0011,如图1所示,结果中的每一位二进制数对应CAM内部每一条数据,数据线上数据与CAM内部数据相等则对应位输出为1,不相等则输出为0。由于CAM具有并行匹配特性,所以很适合对空间多个目标进行同时并行匹配处理。
2 MicroBlaze软核控制器
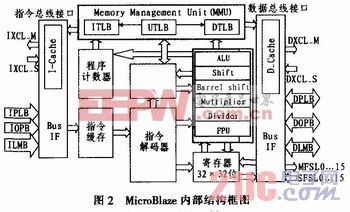
MicroBlaze是基于Xilinx公司FPGA的微处理器IP核,它和其他外设IP核一起可以完成可编程系统芯片(SOPC)的设计。MicroBlaze处理器采用RISC架构和哈佛结构的32位指令和数据总线,内部有32个32位宽度的通用寄存器;其内部结构图如图2所示。
使用Xilinx公司提供的EDK(嵌入式系统开发套件),可以在参数化的图形界面下方便地完成嵌入式处理器系统的设计。其突出的优点:一是设计灵活性;二是可以整合用户自定义IP核,使得算法可以在硬件中并行的执行而不是在软件中串行的执行,从而极大地加速软件的执行速度。











评论