基于单片机设计的发动机测量方法

1 引言
本文引用地址:https://www.eepw.com.cn/article/171799.htm在航空发动机中,对振动的监控具有重要的作用,它可以有效的分析发动机的工作情况,同时振动值也是发动机性能评定的重要标准之一,而如何正确测量发动机的振动参数,如振动的速度,位移和加速度也就成为了一个重要的研究内容。本文即从此方向入手,进行一种方法的论述与实现。
2 测量原理分析
由于发动机振动速度传感器输出的频率信号与发动机振动速度成正比,可采用频率测量法,即通过测量发动机传感器的输出频率来得到相应的振动速度。同时,由发动机振动形成机理和实践经验可知,传感器的输出频率中混杂有高频和低频噪声信号,为了提高测量精度,必须将其过滤掉,因此首先对得到的振动速度信号进行放大和高、通滤波处理。振动的速度、位移和加速度信号之间存在着一定的关系,将滤波后的振动速度信号经过积分,可得到振动位移信号,经过微分,可得到振动的加速度信号。为了提高测量的准确性,通过模拟开关和RMS幅值测量元件将上述信号转化为0-5伏的电压信号,再经过VFC转化芯片,将电压信号转化为频率信号,这样可得到非常稳定的频率信号,然后输入到单片机T0引脚进行计数。
脉冲频率的计数由单片机内部16位计数器完成,计数的闸门时间(时基)由晶振提供,此设计中还利用了数字滤波技术来提高转速的测量精度和测量稳定性。
在设计中,为了提高系统的维护性,增加了自校功能,将选择开关打到自校时,由频率信号给定器给出频率信号送入系统中,通过看输出结果来决定是否进行校正。同时为了方便使用,加入灵敏度系数调整机制,并在每次系统开机后自动由E2PROM加载到系统的内存RAM中,在调整了灵敏度值、系统关机或突然断电的时候,会由中断程序将当前灵敏度值保存到E2PROM中,方便下次的使用(见图2主程序流程图)。为了保证系统的可靠性,看门狗电路也是不可少的。
3 具体实现
3.1 测量振动量
根据上面的分析,进行硬件的设置,绘制测量系统的总体框图如图1所示。
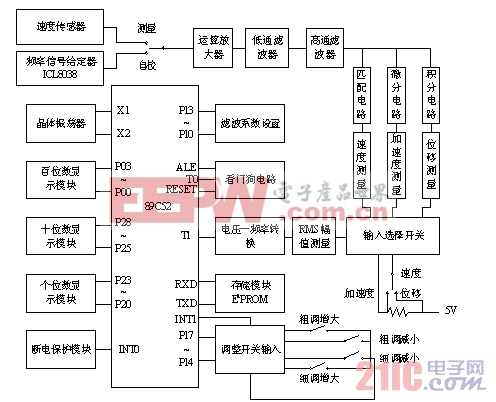
图1 总体框图
通过速度传感器得到振动速度信号后,进行放大和高、低通滤波处理。滤波后,分为三路,一路经过运放匹配电路,得到振动速度信号,一路经过积分电路,得到振动位移信号,一路经过微分电路,得到振动的加速度信号。三种信号经过测量选择开关的选择,将欲测量的一路信号通过模拟开关,输送到RMS幅值测量元件 AD637中,将其转化为0-5伏的电压信号,再经过VFC转化芯片,将电压信号转化为频率信号,然后输入到单片机T0引脚进行计数。
MCS-51系列单片机内部设置了两个16位可编程的定时器/计数器T0和T1,它们具有计数器和定时器两种工作方式和四种工作模式,通过设置状态字,可以方便的选择适当的工作方式与工作模式;同时,单片机设有两个外部中断,相应信号输入引脚是INT0和INT1,用于输入外部中断源的中断请求信号。在此,采用计数器T0的16位计数模式,用于对输入频率信号的计数,T1采用定时方式,定时时间为0.1s,4次定时0.4s,在中断服务程序中读取T0内容并计算和显示振动值,具体见图4,T1中断服务程序流程图(可根据DIP开关选择滤波系数和显示刷新率)。显示值由P3口的低四位输出百位显示数据,由 P2口的高四位输出十位显示数据,P2口的低四位输出个位显示数据。分别驱动14513进行显示。
3.2 调整开关
灵敏度系数调节通过INT1来完成,如图1所示的粗调或细调信号由一个开关按钮产生,即按下按钮后产生一个逻辑低电平信号,此信号在送往INT1引脚并引起中断的同时,也送到P1的高四位,这样,扩展了中断源的判断信息,在INT1的中断服务程序中,同时对相应的P1口的引脚信号进行判断,进而执行不同的处理程序,详见图5,INT1中断服务程序。同时,对调节后的灵敏度值进行边界条件的判断,即最大值与最小值的判断。若进行粗调或细调后所得到的灵敏度系数为0或大于999,则系统认为是不合法(在第一次上电时的情况),重置为200,然后闪烁显示4~5次。

接地电阻相关文章:接地电阻测试方法












评论