FPGA在直流电机位置控制中的应用

摘要:由于直流电机具有速度易控制,精度和效率高,能在宽范围内实现平滑调速等特点而在冶金、机械加工制造等行业中得到广泛应用。该设计采用FPGA作为直流电机的控制器件,负责信号处理,速度快、可靠性高。介绍直流电机进行位置控制的方法,给出位置控制模块的设计和实现,使用 VHDL语言进行编程完成了FPGA对直流电机的各种控制。
关键词:位置控制;直流电机;FPGA;VHDL
在直流电机控制系统中,被控制量一般都是电机的转速,控制的目的是保持电机的转速在所需要的定值上。但在实际生产过程中,电机带动生产机械或者其他负载运动的表现不一定都是转速,也可能是使生产机械或其机构产生一定的位置变化,这时需要的控制量就不再是电机的转速,而是控制对象的直线位移,因此需将电机的转速输出转换为电机的位移输出。
1 电机位置控制模块的设计
1.1 直流电机位置控制的方法
在此,使用maxon直流电机,通过与其配套的行星齿轮箱和磁编码器,能够实现从转速到位移的转换。其工作原理如下:电机转动时,编码器开始输出反馈脉冲,反馈脉冲的频率与电机的转速成正比,最高可达20 kHz。电机轴每旋转一圈,编码器就输出16个反馈脉冲,通过计算得出每个脉冲代表电机所带负载产生0.006 14 mm的位移。这样就可以把要控制的位移量用反馈脉冲的个数来表示,作为FPGA中位置控制模块给定值,当电机转动时,FPGA中的计数器会把反馈脉冲计数并保存,位置控制模块不断读取计数器里的计数值,并与位置控制模块中的给定值比较。当它们相等的时候,位置控制模块发出停止信号,从而控制电机刹车。电机停止运动后,再读取计数器中的计数值,与给定值做比较,计算出差值。如果差值在控制精度范围内,则此次控制结束;如果不在范围内,将差值作为下一次控制的给定值,继续控制电机运动,直至达到要求的精度范围为止。
1.2 位置控制模块的组成
位置控制模块由3部分组成:比较模块、驱动模块和延时模块。比较模块的作用是将编码器反馈的脉冲个数与给定的脉冲个数做比较,当它们相等时,给出电机停止信号。驱动模块的作用是根据输入的控制信号控制电机的运动。延时模块的作用是防止丢失反馈脉冲,确保准确读回编码器反馈的脉冲个数。接下来将重点介绍各个模块的具体实现。
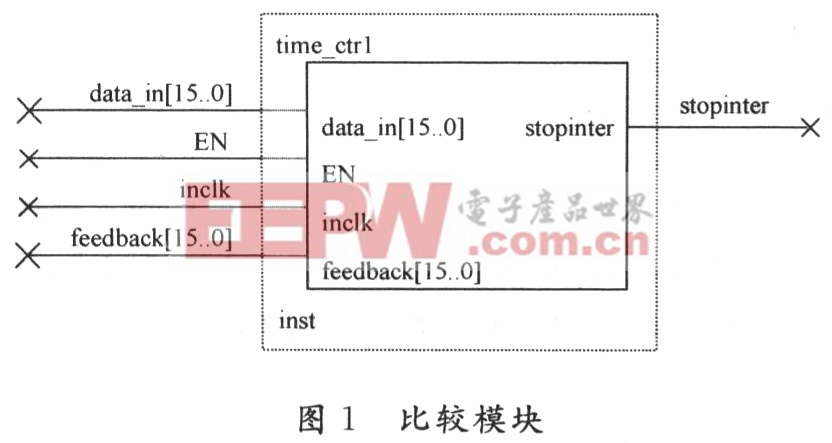
1.2.1 比较模块
图1中,data_in[15..O]为给定的反馈脉冲个数;EN为电机工作使能信号;inclk为工作时钟;feedback[15..0]为电机运行时计数器的计数值;stopinter为电机停止时的模块内部传递信号;“O”表示无效,“1”表示有效。比较模块的工作原理如下:比较模块在接收到给定值后,也就是根据要控制的位移量所计算出的反馈脉冲的个数,将其锁存。在工作时钟的作用下,模块会不断地检测EN信号是否有效,如果EN信号有效,模块将开始读取反馈计数值,并与给定值做比较;如果相等,模块认为电机所带负载的运动到达指定位置,这时输出的stopinter信号有效,控制电机刹车;否则 stopinter信号无效,电机继续运动。
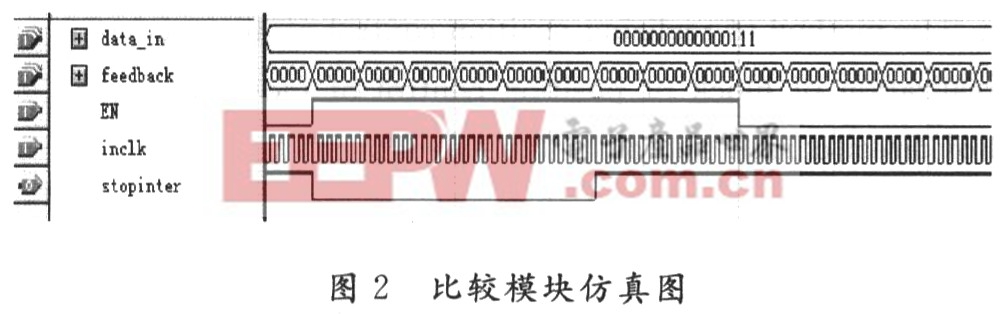
如图2所示,假设给定的计数值为7。当使能信号EN有效时,模块开始读端口feedback[15..O]中的值(电机运行时通过磁编码器反馈回来的脉冲个数),与data_in[15..0]中给定的脉冲个数做比较。当它们相等的时候,表示电机所带的负载运动到了指定位置,此时stopinter信号有效,开始控制电机刹车并停止。
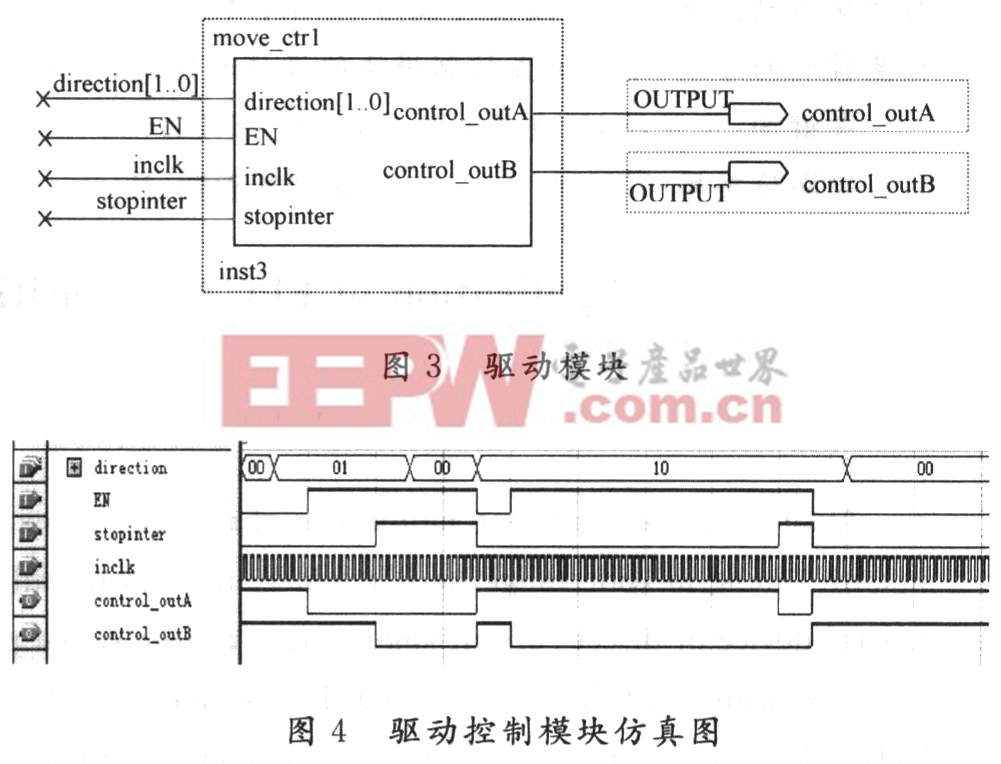
1.2.2 驱动模块
图3中,derect[1..O]为电机的控制输入信号;EN为电机工作使能信号,“0”表示无效,“1”表示有效;inclk为工作时钟; stopinter为电机停止信号的模块内部传递信号;control_outA,control_outB为控制电机的输出信号,这两个控制信号直接连接电机的驱动芯片。驱动模块的工作原理如下:













评论