一种移动机器人遥操作接口系统的设计与实现

摘 要:针对移动机器人的远程操作问题,基于C++Builder软件环境,设计和实现了一种移动机器人的遥操作接口系统,可利用方向盘、键盘和鼠标来操作机器人的移动。基于此接口系统建立了遥操作系统原型,并且进行了室内试验。室内试验表明,此遥操作接口系统具有简便、界面友好等特点。
关键词:遥操作;人机接口;移动机器人;软件环境
0 引 言
遥操作就是远距离操作,是在远方人的行为动作远距离作用下,使事物产生运动变化。遥操作是一种基础技术,应用领域相当广泛,如机器人领域、航空航天领域、基础科学试验、核工程、海底与远洋作业等。遥操作技术使移动机器人到达艰险的环境,通过机器人完成特定的任务,从而可以使人远离艰险的工作环境。因此,研究遥操作技术意义深远。
机器人在物理空间上,可以实现人类感知能力和行为能力的延伸;在信息层次上将远端的移动机器人与操作人员无形连接在一个闭环回路里,实时地控制远端移动机器人的运动,以最大限度地利用远近端设备、资源和遥操作者的智力、经验,从而实现资源的最佳配置,完成特定的任务。人机接口系统就是通过什么样的方式来发送控制指令和进行状态数据的反馈,是移动机器人中一项重要的技术。
基于遥操作平台,设计了一种针对“喀吗哆”机器人的人机接口系统。采用该人机接口系统进行了机器人室内行走实验。实验表明,该人机接口系统方便灵活、可靠、人机接口系统显示丰富生动,提供多种操作模式,可实现数据的存储和实时显示。
1 机器人人机接口系统
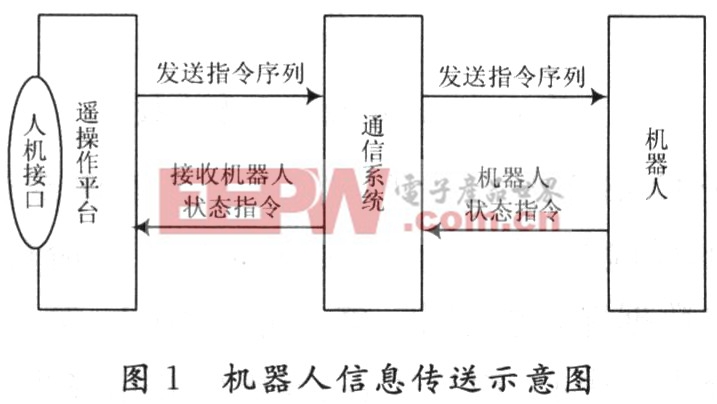
一种柔性结构的四轮式移动机器人,其信息传送示意图如图1所示。
基于遥操作平台和通信系统,远方操作员通过人机接口将指令序列发送到机器人,机器人接收并编译指令,并且把编译之后的指令发送到相应的执行机构,再由执行装置来控制机器人的移动。同时机器人通过通信系统将其各种状态和相关信息传到遥操作平台中,远方操作员可以通过人机接口看到与机器人相关的信息。该设计实现的是与遥操作平台相嵌的人机接口系统部分,即图1中椭圆表示的部分。
2 设计与实现
该系统用到相关硬件设备如下:计算机(P4 1.8 G、512 MB内存、USB端口、Windows XP操作系统、Di-reetX 9.0版本)1台、标准键盘1个、鼠标1个、SG-USB006E型赛诺方向盘一个。软件有Borland C++Builder编译环境。
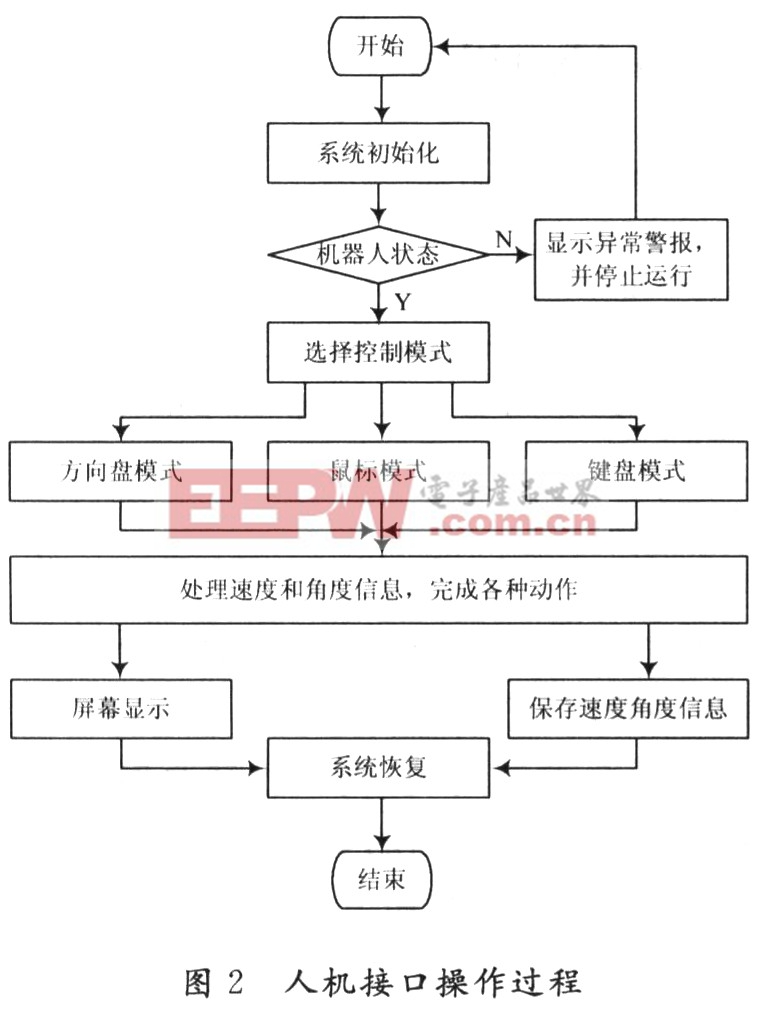
人机接口系统操作过程见图2。首先,开始之后系统初始化,检测是否连接了方向盘。若检测到方向盘,下面可有方向盘、键盘和鼠标模式可供选择;若没有检测到方向盘,只可选择键盘和鼠标模式。接着,判断机器人状态是否正常。若异常,则显示异常警报,返回到开始;若正常,根据是否检测到方向盘,则可在可选的操作模式中选择一种或几种操作模式。接着,可以通过已选模式操作机器人,同时接口系统将相应速度和角度等数据写入缓冲区,根据缓冲区的数据,机器人最终可以完成各种相应的动作。同时接口系统还可以实现机器人相应信息的屏幕显示和速度角度等信息的保存等。









评论