模糊PID控制器的设计与仿真研究

摘要:本文把MATLAB中的Fuzzy Toolbox和SIMULINK结合起来,讨论了模糊逻辑控制器的设计与仿真问题,以实现PID控制器参数的自调整,提高系统控制的精度。仿真结果表明,模糊PID控制器明显改善了系统的动态性能和稳态性能,使系统控制达到了满意的效果,对系统控制和系统的调整具有一定理论价值。
关键词:模糊PID控制器;SIMULINK;参数调整;仿真
0 引言
在工业生产过程中,许多被控对象随着负荷变化或干扰因素的影响,其对象特性参数或结构发生改变,而且现代工业生产过程往往都是时变、非线性、大时滞的复杂系统,系统的精确数学模型往往难以获得,经典的PID控制方法遇到了难以克服的困难,而且在实际生产现场,由于常规PID参数整定方法繁杂,其参数整定不良、性能欠佳,对运行工况的适应性差。
人们一直在寻求PID参数调整的自适应技术,以适应复杂的工况和高指标的控制要求。随着控制理论和计算机技术的发展,人们利用人工智能的方法将操作经验作为知识存入计算机中,根据现场实际控制情况,计算机能根据工况和控制要求自动调整PID参数,实现PID的智能控制。本文将模糊控制与PID控制结合起来,构造自适应模糊PID控制器,实现PID参数的最佳调整,以增强系统对不确定因素的适应性。
1 自适应模糊PID控制器的设计
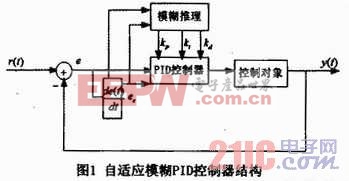
以常规PID控制为基础,采用模糊推理理论,将被控制量的偏差e和偏差变化率ec作为二维模糊控制器的输入变量,通过模糊控制器的输出变量,利用模糊控制规则在线调整PID各参数,便构成了自适应模糊PID控制系统。自适应模糊PID控制器结构框图如图1所示。

pid控制器相关文章:pid控制器原理








评论