四旋翼无人机建模及其PID控制律设计
1.2 四旋翼无人机动力系统建模
1.2.1 电机动力学模型
其中,JTM为电机的转动惯量,QL为负载扭矩,Q是电机扭矩.V是电机两端电压,I是电机通过的电流,ω是电机转动角速率,Kq,Ra和Ke是电机的特定常数,Kq将电流和扭矩关联,Ra是电机转子的总阻抗,Ke将电机转速关联到电动势。
1.2.2 螺旋桨的模型
文中只考虑螺旋桨沿构造旋转轴的升力T和扭矩Q,忽略其受到的阻力和侧向力矩。这些力或力矩均与旋翼转速的平方(Ω2)成一定比例关系

其中,CT,CQ分别为旋翼的拉力系数、阻力系数、扭矩系数和侧倾力矩系数,ρ为空气密度,R为桨叶半径,A=πR2浆盘面积。
2 四旋翼无人机PID控制律设计
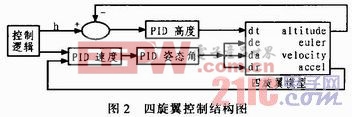
2.1 四旋翼无人机PID控制结构
文中的主要目的是基于PID的四旋翼控制问题研究,其最终目标是要验证PID能有效的控制四旋翼在没有重心偏移和有重心偏移下情况下的姿态角和速度。故而首先要对所用的四旋翼飞机进行建模,然后进行控制器的设计,最后进行仿真验证。本文引用地址:http://www.eepw.com.cn/article/159753.htm
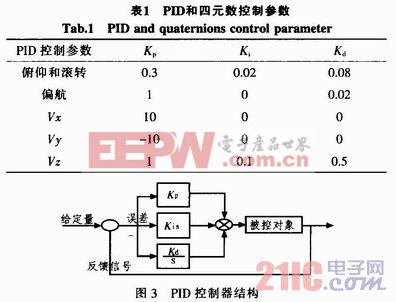
2.2 四旋翼无人机PID控制参数和PID控制器结构图

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理


















评论