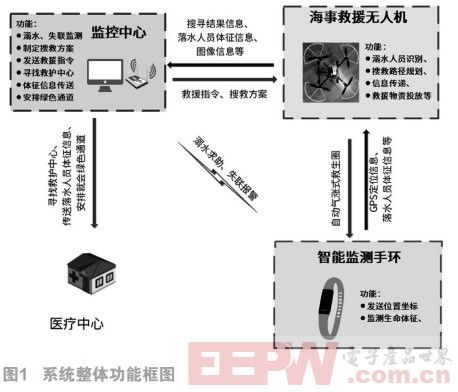
- 介绍了一种基于四旋翼飞行器简单、快速地搜寻海上落水者的系统。该系统由三部分组成:海事救援无人机、智能可穿戴设备和监控中心。海事救援无人机和智能可穿戴设备均采用Cortex-M4内核的XMC4700处理器。当人员落水时,智能可穿戴设备会不断向外界发送佩戴者的位置信息和生命体征。海事救援无人机能按照预定轨迹飞行,同时利用机载摄像头实时搜索落水者并将图像传送至监控中心。无人机还能在飞行的过程中不断搜索附近是否有智能可穿戴设备的信号,若有,则将所得信息发送至监控中心同时飞向该位置并在人的指挥下投掷下救生物品。监控
- 关键字:
四旋翼 飞行器 海上搜救 处理器 201901

- [EEPW北京消息]经过参赛选手与评审专家两天时间的共同协作,6月8日顺利评选出第三届“时代民芯”杯电子设计大赛的各奖项。其中一等奖1名,二等奖2名,三等奖5名。经与会评审专家合议一致认为,因为进入终审阶段的18组作品中,均未达到特等奖的要求,因此本次大赛特等奖奖项仍空缺。
- 关键字:
时代民芯 导航 MXTOS2-200 四旋翼

- 文中对四旋翼无人机进行建模与控制。在建模时采用机理建模和实验测试相结合的方法,尤其是对电机和螺旋桨进行了详细的建模。首先对所建的模型应用PID进行了姿态角的控制。在此基础上又对各个方向上的速度进行了PlD控制。然后在四旋翼飞机重心进行偏移的情况下进行PID控制,仿真结果表明PID控制律能有效的控制四旋翼无人机在重心偏移情况下的姿态角和速度。最后为了方便控制加入了控制逻辑。
- 关键字:
四旋翼 建模 PID 控制 重心偏移 控制逻辑
四旋翼介绍
您好,目前还没有人创建词条四旋翼!
欢迎您创建该词条,阐述对四旋翼的理解,并与今后在此搜索四旋翼的朋友们分享。
创建词条
关于我们 -
广告服务 -
企业会员服务 -
网站地图 -
联系我们 -
征稿 -
友情链接 -
手机EEPW
Copyright ©2000-2015 ELECTRONIC ENGINEERING & PRODUCT WORLD. All rights reserved.
《电子产品世界》杂志社 版权所有 北京东晓国际技术信息咨询有限公司

京ICP备12027778号-2 北京市公安局备案:1101082052 京公网安备11010802012473