四旋翼无人机建模及其PID控制律设计

摘要:文中对四旋翼无人机进行建模与控制。在建模时采用机理建模和实验测试相结合的方法,尤其是对电机和螺旋桨进行了详细的建模。首先对所建的模型应用PID进行了姿态角的控制。在此基础上又对各个方向上的速度进行了PlD控制。然后在四旋翼飞机重心进行偏移的情况下进行PID控制,仿真结果表明PID控制律能有效的控制四旋翼无人机在重心偏移情况下的姿态角和速度。最后为了方便控制加入了控制逻辑。
关键词:四旋翼;建模;PID;控制;重心偏移;控制逻辑
四旋翼无人机是一种具有4个旋翼的飞行器,有X型分布和十字型分布2种。文中采用的是X型分布的四旋翼,四旋翼无人机只能通过改变旋翼的转速来实现各种运动。国外对四旋翼无人直升机的研究非常活跃。加拿大雷克海德大学的Tavebi和McGilvrav证明了使用四旋翼设计可以实现稳定的飞行。澳大利亚卧龙岗大学的McKerrow对Dragantlyer进行了精确的建模。目前国外四旋翼无人直升机的研究工作主要集中在以下3个方面:基于惯导的自主飞行、基于视觉的自主飞行和自主飞行器系统。而国内对四旋翼的研究主要有:西北工业大学、国防科技大学、南京航天航空大学、中国空空导弹研究院第27所、吉林大学、北京科技大学和哈工大等。大多数的研究方式是理论分析和计算机仿真,提出了很多控制算法。例如,针对无人机模型的不确定性和非线性设计的DI/QFT(动态逆/定量反馈理论)控制器,国防科技大学提出的自抗扰控制器可以对小型四旋翼直升机实现姿态增稳控制,还有一些经典的方法比如PID控制等,但是都不能很好地控制四旋翼速度较大的情况。本文对四旋翼无人机设计了另外一种不同的控制方法即四旋翼的四元数控制律设计,仿真结果表明这种控制方法是一种有效的方法。尤其是对飞机的飞行速度较大的情况,其能稳定地控制四旋翼达到预期的效果。
1 四旋翼的模型
文中所研究的四旋翼结构属于X型分布,即螺旋桨M1和M4与M2和M3关于X轴对称,螺旋桨M1和M2与M3和M4关于Y轴对称,如图1所示。对于四旋翼的模型本文主要根据四旋翼的物理机理进行物理建模,并做以下2条假设。

1)四旋翼无人机是绝对的刚体,不考虑其结构和弹性形变,而且机体的重心位置不变,其质量为常数;
2)假设地面为惯性参考系,即假设地面坐标系为惯性坐标系。
利用电子秤测出各个零部件的质量,利用游标卡尺和直尺测出各个零部件的尺寸,应用悬吊法测出其机体的重心。立机体坐标系并求出四旋翼的转动惯量,对于不规则的物体进行必要的简化和等效,对于螺旋桨的建模忽略了其所受的空气阻力和侧向力矩,只考虑螺旋桨的升力和扭矩。
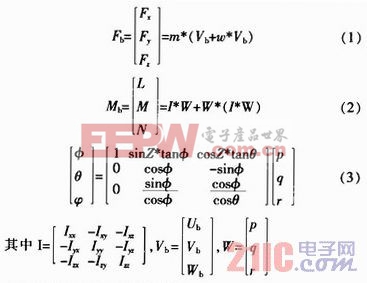
1.1 四旋翼动力学方程
在机体坐标系下的受力与力矩关系式:

pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理










评论