基于矩角控制的PMSM伺服系统仿真与设计

摘要:随着我国经济和工业水平的不断提高与发展,高性能、低功耗的伺服系统备受关注。以永磁同步电机(PMSM)为母机的伺服系统以其高性能比而受到诸多关注。以PMSM为控制对象,对交流步进传动中矩角控制方式应用于伺服系统的情况,进行了动态仿真研究与实际实验平台验证。仿真与实验结果表明,应用矩角控制方式的PMSM伺服系统具有良好的动态特性与定位特性,完全满足现代工业伺服系统中的高性能、低功耗的要求。同时,研究结果也为PMSM在高性能控制场合下的应用打下了坚实的理论与实验基础。
关键词:永磁同步电机;矩角控制;伺服系统
1 引言
PMSM以其高效性、高转矩惯量比、高能量密度而受到诸多关注,因而在数控机床、军工、航天等领域逐渐得到广泛应用。交流步进传动控制是将位置控制、速度控制和伺服控制等不同的传动控制方式有机结合,使PMSM的气隙磁动势由连续的旋转磁场变为离散的步进磁场。对离散的步进磁动势进行控制,可获得良好的速度控制,还可进一步取得精确的位置控制,从而形成高性能的交流传动控制系统。电力电子技术的应用使系统具有离散控制的基本特征,使传统的运动控制思想得到突破。它打破了连续与离散、速度与位置、旋转与步进的严格界限,形成了一种统一的交流步进控制理论。
2 步进控制与矩角控制理论
2.1 步进控制理论
PMSM的步进控制的中心思想是将电机的定子电流离散为bH步。每一步对应一个大小固定和位置步进的定子磁动势,与转子磁动势构成步进角,从而产生步进的复位转矩,进而将转子锁定在一个特定位置上。若将PMSM的定子磁势由旋转磁势离散为步进磁势,则定子气隙中所停靠的位置也就是该电机步进运动时能够提供的定位点数,即电机的每步数。当PMSM定子绕组输入三相对称正弦电流ia,ib,ic时,有:
![]()
式中:Im为输入三相电流的峰值。
将PMSM三相磁动势进行合成可知,三相绕组产生的气隙磁动势是一个旋转磁动势,其幅值是相脉振磁动势幅值Fa的1.5倍即![]() 。
。
若按电角度计算,旋转磁动势在空间运行的电角度θ与绕组中电流在时间上经历的电角度永远相等,即:θ=ωt。当电流在时间上经历一个周期时,旋转磁动势在气隙中正好进行27π的电角度,故旋转磁动势每秒钟的转速为:n=f/pm。其中,f为定子电流的频率,pm为电动机的磁极对数。
假设对于三相定子绕组,若不输入连续正弦电流,而是输入下列对称离散电流:
式中:bH为环形分配器的循环拍数;k为主令脉冲的拍数。
将输入电流的一个周期分为bH份(bH为正整数),对于三相绕组,为了保证三相电流互差2π/3和各相的正负半周对称,最好取bH为6的整数倍,k为任意正整数。由此得到的气隙磁动势将是一个步进磁动势:![]() 。
。
2.2 矩角控制理论
在PMSM的传动控制中,定子上产生的电枢磁势Fs与转子磁势Fr同步旋转,产生电磁转矩T。气隙中的合成磁势F=Fm+Fs。
对于步进PMSM,需要特别关心Fs与Fr的夹角θ,即矩角。转矩方程为:T=CTFsFmsinθ。由于PMSM转子为永磁体,其Fr大小恒定,当Fs也为恒值时,T∝sinθ。PMSM矩角控制正是在此基础上提出的,即通过控制θ的大小,实现对T的控制。矩角特性如图1所示。
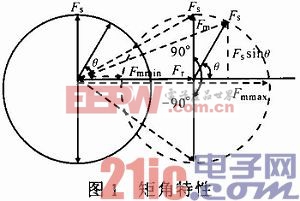
图1以转子位置为参考坐标轴,定、转子的合成磁势定义为Fm=Fr+Fs。当θ=0时,Fm达到最大值;当θ=π时,Fm达到最小值;当0θπ/2时,磁场增强;当π/2θπ时,磁场减弱。电机运行状态与θ关系如表1所示。











评论