基于高频信号注入的永磁同步电机无传感器控制策略研究*
 加入技术交流群
加入技术交流群

扫码加入
和技术大咖面对面交流
海量资料库查询
*湖南省教育厅创新平台开放基金项目(19K026)
本文引用地址:https://www.eepw.com.cn/article/202110/428691.htm0 引言
永磁同步电机(Permanent magnet synchronous motor,PMSM)具有转矩密度大、动态性能好、可靠性高等竞争优势,已广泛应用于交通、制造设备、家电等行业[1-3]。同时,无传感器控制在永磁同步电机中具有成本降低、系统小型化和可靠性提高等优点。零和低速下的PMSM 无传感器控制方法主要是高频信号注入。高频信号注入法是基于电机凸极性的,其主要思想是:将高频电压信号注入电机定子端,定子电流中会出现一个响应电流信号,此响应信号就包含了转子的位置相关信息,可凭借软件处理获取转子的实际位置。高频信号注入法主要有以下两种:基于旋转高频信号注入法[4-6]和基于脉振高频信号注入法[7-9]。高频信号注入法可保证电机低速下稳定运行,此方法在理论上具有很高的精度,但无论是在高频响应电流、控制电流的提取,还是绕组、永磁体、以及开关损耗,都对算法和硬件电路提出了很高的要求。而过往的研究中脉振高频正弦注入证明了其良好的鲁棒性及估计精度,且控制方法简单,故本文选择脉振高频电压注入法作为PMSM 零和低速范围下的无传感器控制策略进行研究。
1 脉振高频电压注入法
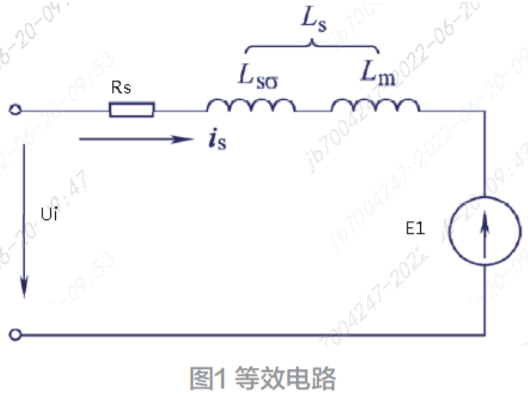
在脉振高频电压信号注入法(HFPVI)中,需要建立起如图 1 所示的实际转子两相旋转(d − q)坐标系与估计转子两相旋转 坐标系之间的联系。
坐标系之间的联系。

图1 中, θe实际转子位置值,加“  ”的均为估计值,往转子估计两相旋转
”的均为估计值,往转子估计两相旋转 坐标系注入高频脉振电压信号
坐标系注入高频脉振电压信号 , 其中Uh为注入电压幅值, ωh为注入电压频率,
, 其中Uh为注入电压幅值, ωh为注入电压频率, 为转子估计误差角。根据式(1)可得到PMSM 的ψ − i 特性曲线,如图2 所示。当在特性曲线上的任一点通入能够产生相同磁链的正反方向直轴电流
为转子估计误差角。根据式(1)可得到PMSM 的ψ − i 特性曲线,如图2 所示。当在特性曲线上的任一点通入能够产生相同磁链的正反方向直轴电流 由于磁场叠加作用导致磁路饱和发生变化,得到
由于磁场叠加作用导致磁路饱和发生变化,得到 此时的交直轴ψ − i特性曲线相似,饱和现象消失,使得
此时的交直轴ψ − i特性曲线相似,饱和现象消失,使得


在旋转(d − q)坐标系下的PMSM 数学模型为:

式(2)(3)中,ψpm为转子磁链, ωr为转角速度。
估计旋转 坐标轴下的高频信号电磁关系式:
坐标轴下的高频信号电磁关系式:

式(4)中Δθe为位置误差角向估计坐标系的 轴注入如下高频信号:
轴注入如下高频信号:

将式(5)代入式(4)中得到高频响应电流为:

由式(6)可以看出,当Δθe为零时, 轴高频电流也等于零,故在对
轴高频电流也等于零,故在对 轴高频电流采取锁相环(PLL)进行位置信息提取,得到需要的转子位置信息。
轴高频电流采取锁相环(PLL)进行位置信息提取,得到需要的转子位置信息。

若是Δθe足够小,则可将式(7)线性化

其中 从式(8)可以看出,
从式(8)可以看出, 与Δθe成线性相关,若调节iθ 的数值趋于零,则Δ θe也趋于零,意味着此时转子位置的估计值将收敛至实际值。
与Δθe成线性相关,若调节iθ 的数值趋于零,则Δ θe也趋于零,意味着此时转子位置的估计值将收敛至实际值。
2 转子位置估计
为了获得电机转子位置信息,多用基于锁相环(phase-locked loop,PLL)的转子位置估计方法,其控制系统如图3 所示。

图3 中的PLL 系统由PI 调节器和LPF 滤波器构成,其控制框图如图4 所示。

图4 中,LPF 滤波器的传递函数为:

将通过LPF 滤波器滤波得到的 作为PI 调节器的输入信号,经过PI 调节器后得到转子位置信息
作为PI 调节器的输入信号,经过PI 调节器后得到转子位置信息 ,将稳态下
,将稳态下 的均值设为Z,则有:
的均值设为Z,则有:

T 为积分步长, ,式(9)可化简为:
,式(9)可化简为:

将式(11)进行变换得到:

要想转子位置估计值收敛于实际值,则需要Δθe的值越小越很好,从式(12)中可以看出,要想估计误差小,则需要注入信号的频率ωh尽可能小,电压幅值Uh尽可能大。而在估计精度Δθe同样的情况下,选择较小的ωh和Uh能够减轻PI 调节器的压力,使PI 调节器的调节系数减小。
3 滤波环节改进
在脉振高频电压注入法中,响应电流的提取过程复杂,需要用到不少BPF、HPF、LPF 进行信号分离。而滤波器的使用不仅增加了控制系统的计算负担,也会导致信号出现衰减、延迟等现象。高频电压激励下的响应电流包含高频分量和基频分量。传统脉振高频电压注入法的设计中,常采用LPF 将基波电流反馈信号提取出来。LPF 优点明显,当滤波器的阶数设计的足够高时,可以基本滤除高频信号,但是缺点也很明显,使用LPF 会造成电流信号相位上的延迟。基于此本文提出了一种简化滤波设计,将传统脉振高频电压注入法中提取 轴基频电流反馈信号用到的LPF 省去,
轴基频电流反馈信号用到的LPF 省去, 轴基频电流反馈信号可以通过
轴基频电流反馈信号可以通过 轴电流与
轴电流与 轴高频响应电流做差得到,如式(13)所示。
轴高频响应电流做差得到,如式(13)所示。
![]()
4 仿真分析
改进后的脉振高频电压注入法控制框图如图5 所示,并在MATLAB/Simulink 环境下搭建如图6 所示的仿真模型。


为了验证改进算法在低速区域无传感器控制的动态性能,进行转速突变仿真实验,给定初始转速60 r / min ,带有初始负载转矩5 N⋅m,在1 s时突变至240 r / min,3 s 突降至180 r / min ,进行转速突变仿真实验,验证系统的调速性能。图7 为转速突变相关仿真波形对比。设计的脉振高频电压注入法在转速突变过程中动态调节性能良好,能快速稳定,实际转速与估计转速之间的误差小,运行曲线光滑,转速突变时最大转速误差为0.3 r / min ,稳定状态下为0.02 r / min ,位置误差最大时仅为0.08 rad ,稳定状态下不超过0.02 rad 。通过对滤波环节的改进,去掉了电流闭环反馈控制的LPF,减小了控制系统的计算量,一定程度上削弱了电流信号因滤波器导致的信号衰减以及相位滞后。

(a1)转子转速变换曲线

(a2)转子误差变化曲线

(a3)转子位置变换曲线

(a4)位置误差变换曲线
图7 转速突变仿真对比波形
5 结束语
本文首先介绍高频信号注入法的基本原理以及分类,选取了脉振高频电压注入法作为研究对象进行低速下的PMSM 无传感器控制。针对注入法提取信号滤波环节使用多个滤波器造成信号衰减、相位滞后等问题提出改进方法。在MATLAB/Simulink 中建立仿真模型,对设计的脉振高频电压注入法的进行了动态仿真实验,仿真结果表明了所设计无传感器控制算法各项性能指标很好地满足低速状态下PMSM 无传感器控制的性能需求。
参考文献:
[1] TANG Q P,SHEN A,LUO X,et al.PMSM sensorless c o n t r o l b y i n j e c t i n g H F p u l s a t i n g c a r r i e r s i g n a l i n t o A B C f r am e [ J ] . I E E E T r a n s a c t i o n s o n P o w e r Electronics,2016,32(5):1-1.
[2] XU W,JIANG Y,MU C,et al. I m p r o v e d n o n l i n e a r f l u x o b s e r v e r - b a s e d s e c o n d - o r d e r S O I F O f o r P M S M s e n s o r l e s s c o n t r o l [ J ] . I E E E T r a n s a c t i o n s o n P o w e r Electronics,2019,34(1):565-579.
[ 3 ] 王高林, 杨荣峰, 李刚, 等.基于高频信号注入的IPMSM无位置传感器控制策略[ J ] .电工技术学报,2012,27(11):62-68.
[4] LI G,TENG Q,WANG C,et a l . F C S - M P C s t r a t e g y w i t h sliding mode control for PMSM s y s t e m s d r i v e n b y f o u r -switch inverters[J].Journal of Zhejiang University (Engineering Science),2017,51(3):620-627.
[ 5 ] 言钊, 颜建虎, 费晨.基于旋转高频信号注入法的内置式永磁同步电机低速段转子位置检测及其误差补偿[ J ] .电机与控制应用,2018,45(9):1-8.
[6] 于安博,刘利,阚志忠,等.高频脉振信号注入永磁同步电机无滤波器初始位置辨识方法[J].电工技术学报,2021,36(4):801-809.
[7] 樊生文,李雷,郑春雨.两种高频信号注入法无传感器运行分析对比[J].控制工程,2017,24(10):2093-2098.
[8] 杜平,关振宏,王涛,等.两种高频信号注入法与坐标系结合的无位置传感器运行研究[J].电机与控制应用,2017,44(2):28-32.
[9] 刘海东,周波,郭鸿浩,等.脉振高频信号注入法误差分析[J].电工技术学报,2015,30(6):38-44.
(本文来源于《电子产品世界》杂志2021年9月期)










评论