基于DDS技术的动态偏振控制器驱动电路研究

引 言
偏振控制器是一种重要的光器件,在光纤通信和传感领域都有着广泛的应用。在光纤通信系统中,准确地控制光纤中的偏振态,关系着系统的稳定性和数据传输的误码率。然而在消偏型光纤陀螺中,准确测量光的偏振度也是保证光纤陀螺精度的有效措施。因此,偏振控制器(PC)作为一种改变输入光偏振态的光器件是不可缺少的一种偏振控制器件,在PMD动态补偿、偏振度(DOP)测试等方面发挥着重要的作用。
但是在实际运用中,偏振控制器的半波电压与厂家给出的标称值并不完全一致,导致了使用的不便。因此在使用时需要有与之配套的驱动电路。但是,许多厂家并不提供配套的驱动电路,即使提供,价格也昂贵,在实际工程开发中不能达到最佳性价比。因此,自主研制DPC的驱动电路是很有必要的。
本文以光纤挤压型偏振控制器为研究对象,运用邦加球图示法分析了其工作原理,并介绍基于DDS技术和FPGA的动态偏振控制器驱动电路的工作原理、系统结构及软、硬件设计。测试结果表明,设计实现了驱动电路的预定功能,生成了4路频率幅值均可调的正弦驱动信号。
1 DPC的工作原理
这里研究的光纤挤压型偏振控制器,其内部结构如图1所示。它由4个压电陶瓷光纤挤压器(称为挤压器F1,F2,F3,F4)组成,其方位角分别为0°,45°,O°,45°,各挤压器对应的驱动电压为V1,V2,V3,V4。分别在4个挤压器上加电压信号驱动,产生相应的压力挤压光纤,形成线性双折射,改变入射光波的相位差,从而实现任意偏振态转换。
由文献[3―5]和上述偏振控制器内部结构,可将挤压器中的四段光纤(分别称为d1,d2,d3,d4)看成不同方位角的相位延迟器。
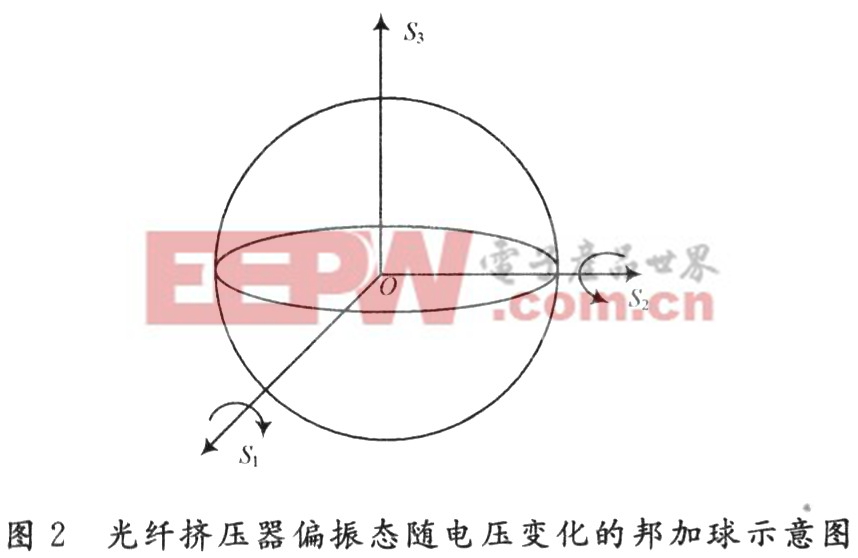
(1)d1,d3可看成方位角为零的相位延迟器,只改变输入光的相位延迟而不改变其偏振方向,在邦加球上表现为输入偏振态绕S1轴的旋转。
(2)d2,d4可看成方位角为45°的相位延迟器,也即旋光器和相位角为零的相位延迟器的合成,不仅改变输入光的相位延迟,也改变其偏振方向,其偏振态变换在邦加球上表现为绕S2的旋转。
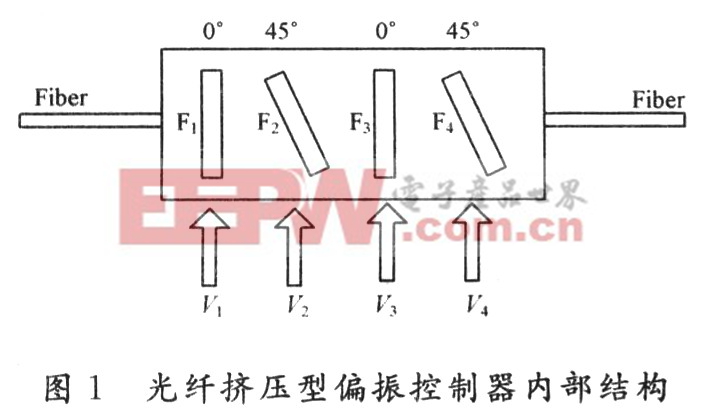
图2为d1,d2,d3,d4对偏振态变换在邦加球上的显示。如图2所示,在邦加球上,随所加电压的变化,d1或d3的输出光起始偏振态S绕S1轴顺时针旋转。d2,d4的输出光偏振态S'随所加电压变化在邦加球上绕S2轴逆时针旋转。

DIY机械键盘相关社区:机械键盘DIY











评论